






1. Introduction
Recently, the rapid development of brain-machine interfaces (BMI) has gained much traction among both the scientific community and the public. A BMI is a neuroprosthetic system that comprises implanted electrodes that detect intended movements in a paralyzed body part, a computer algorithm that interprets these movement intentions, and an assistive device (such as a robotic limb or computer), that responds to these signals. This system effectively connects the brain with an external machine, enabling control through neural activity, and stands out as an impressive example of translational research that aids paralyzed individuals [1].
Recent developments in BMI systems have showcased a wide range of interaction models, highlighting their potential to transform various applications. One of the most advanced and promising models is the integration of surface electromyography (sEMG) signals. Surface electromyography is a non-invasive technique that measures the electrical activity produced by skeletal muscles. Recent studies have explored the use of sEMG for assessing physical comfort under various conditions, such as evaluating vibration comfort in drivers. In one study, eighteen participants drove a tractor at different speeds on both field and asphalt roads, while researchers recorded sEMG signals and vibration acceleration from specific muscles and body parts and analyzed these data in the time and frequency domains [2]. They found that higher speeds intensified body vibration and increased time-domain measures of sEMG and acceleration signals, while decreasing frequency-domain measures.
Another recent study developed an sEMG-based method to improve the diagnosis of lip closure ability in mouth-breathing patients, addressing the limitations of traditional diagnostic methods [3]. This study compared three nonlinear onset detection algorithms: Teager–Kaiser Energy (TKE) operator, Sample Entropy (SampEn), and Fuzzy Entropy (FuzzyEn). The FuzzyEn algorithm outperformed the others, achieving a lip closure identification rate of 93.78%, with minimal time delays and errors. Additionally, the study introduced a Lip Closure EMG Activity Index (LCEAI) to quantify lip closure accurately, demonstrating a high correlation with actual closure levels in patients. This sEMG-based assessment method could serve as a reliable tool for diagnosing mouth breathing by quantifying lip closure ability.
This report focuses on the integration of sEMG signals for precise servo control in real-time hand movement detection. By leveraging the capabilities of sEMG, electrical activities generated by muscle contractions are captured and used to control servo motors, enabling a direct correlation between muscle activity and mechanical response. The study also explores how varying workout exercises and durations influence muscle activity due to hand closing and opening, as reflected in the sEMG signals. By comparing sEMG data collected before and after different types of workouts, the research provides insight into how exercise impacts muscle performance and recovery, further expanding the applications of sEMG in both biomechanical control and fitness monitoring.
2. Background Information
2.1. Proportional Derivative (PD) Control
Proportional-Derivative (PD) control is a fundamental control strategy commonly used in various engineering applications to achieve stable and accurate system responses. It is part of the broader Proportional-Integral-Derivative (PID) control family, which has been extensively employed in control systems due to its simplicity and effectiveness.
The PD controller works by calculating the control signal as the sum of two components: the proportional term and the derivative term. The proportional term produces a control signal directly proportional to the error between the desired setpoint and the actual system output, thereby correcting the system's trajectory toward the desired state. The derivative term, on the other hand, reacts to the rate of change of the error, introducing a damping effect that helps to counteract oscillations and overshoot, leading to smoother system performance.
2.2. Influence of Workout Exercises
Understanding how workout exercises influence sEMG signals is critical for several reasons. First, these insights allow researchers and clinicians to better assess muscle performance and recovery, offering valuable information for designing personalized rehabilitation programs and improving athletic performance. Muscle fatigue, strength, and recovery dynamics are key factors in both sports’ science and rehabilitation, and measuring sEMG before, during, and after workouts helps in quantifying these aspects accurately. Furthermore, sEMG signal variations due to different workout intensities or types can serve as objective feedback for enhancing the effectiveness of training regimens and for preventing injury.
Prior studies have addressed muscle responses during controlled movements. For example, Russo et al. investigated the muscle responses of violin players seated in different chairs, comparing an ergonomic alternative chair (A-chair) with a standard orchestra chair (O-chair) [4]. Using high-density surface EMG (HDsEMG) on the lumbar erector spinae muscles, the study found significant reductions in sEMG amplitude when using the A-chair, but there were no significant differences in the spatial or temporal muscle activation patterns between the chairs.
Another study examined muscle responses in athletes following anterior cruciate ligament reconstruction (ACLR) surgery, focusing on their readiness to return to sport [5]. Resarchers introduced three key features based on surface electromyographic (sEMG) signals: the median frequency of the power spectrum density (PSD), the relative percentage of equivalent damping or stiffness derived from the median frequency, and the energy of the signals in the time-frequency plane using the pseudo-Wigner-Ville distribution (PWVD). To evaluate these features, the researchers gathered sEMG data from 11 healthy individuals and 11 ACLR athletes (six months post-surgery) during pre- and post-fatigue single-leg landings, and the data highlighted a significant damping deficiency in the hamstrings of ACLR athletes, suggesting a need for targeted rehabilitation of this muscle before returning to sport.
Similarly, Sgrò, et al. examined the effects of a specific prevention exercise protocol on muscle responses and shoulder function in water polo athletes [6]. The study included sixteen healthy subjects and sixteen male water polo players, who underwent a three-dimensional motion analysis using optoelectronic and sEMG systems. Functional evaluations were conducted at the start and after 8 weeks of the prevention protocol, which focused on shoulder injury prevention. The protocol led to significant improvements in abduction and extension movements of the glenohumeral and scapulothoracic joints for the players. This approach provides objective, reliable data for assessing shoulder function and potentially preventing injuries in athletes during the sports season.
However, more research is needed to understand how dynamic, real-life exercises affect muscle activity. Addressing this gap could lead to more efficient and precise methods for tracking progress in physical therapy and fitness programs, as well as improving the design of biofeedback devices used in strength training and rehabilitation.
3. Methods
The study was conducted using a feedback system consisting of an Arduino UNO R3 microcontroller board paired with an Olimex EMG shield, three sEMG electrodes, a 3.5mm to 3-electrode cable, an SG90 servo motor, and jumper wires for connections between components. Code upload was performed using a personal laptop with Arduino IDE installed, connected via a USB-A male to USB-B male cable. The 3.5mm cable transmitted the EMG analog signals collected from electrodes placed on different locations of the forearm skin to the Arduino board, where the uploaded program converted them to digital signals. The board then converted the digital signals back to analog and transmitted them to the servo motor via jumper wires, driving the motor to rotate according to the analog feedback captured from the electrodes.
3.1. Task 1
The Olimex shield was mounted on the Arduino board, which was then connected to the laptop with the USB-A male to USB-B male cable. An Arduino example program from a library [7] was compiled and uploaded to the Arduino board; the program set up a timer interrupt to sample the ADC channel 0 at a frequency of 256 Hz and print the ADC values over the serial connection. The 3.5mm cable was then plugged into the headphone jack on the Olimex shield.
Three electrodes were placed on a human test subject’s (in this case, the author himself, a 23 years-old, male with a weight of 92 kg) forearm to monitor hand movement activity, choosing specific positions for accurate signal detection. The first electrode was positioned on the flexor digitorum superficialis muscle, located midway between the wrist and the elbow on the volar aspect of the forearm. The second electrode was placed on the extensor digitorum muscle, on the dorsal side of the forearm, slightly distal to the elbow. The reference electrode was placed on the subject’s left hand. These placements were chosen to directly measure muscle activity associated with hand movements, reduce crosstalk from nearby muscles, and ensure stable and accurate signal measurement. The electrodes were then connected to the 3.5mm cable through snap connections.


Figure 1: Two photos that demonstrate the positions of two measuring electrodes.
The demo Arduino program “ElecGuru40” [8] was used to detect and display the analog signal recorded by the feedback system. The changes in the recorded signal when the subject opened and closed his left hand were observed and recorded.
Then, a different program, modified from the example program, was compiled and uploaded to the Arduino board. This program recorded values in a buffer and used them to compute the root mean square (RMS) voltage, a critical parameter in analyzing muscle activity. During the calculation, each ADC value was converted to an unamplified voltage by dividing it by the product of 1023 (the ADC's maximum value) and the gain factor G. This division ensures that the recorded signal accurately reflects the actual voltage, which is then squared, summed, and averaged across the number of samples. The calculated RMS voltage was continuously sent to the connected laptop via serial communication, enabling real-time monitoring and analysis of muscle signals.
The RMS voltage values when the human subject closed and opened his hand were observed and recorded.
3.2. Task 2
Maintaining the feedback system hardware from Task 1 unchanged, a different program with further modifications was compiled and uploaded to the Arduino board. This new program includes a library for servo rotation, but it does not display the RMS voltage value. Instead, it uses this value to calculate a position for the servo and sends it to the servo motor, enabling it to move in response to the subject’s hand closing and opening.
A servo motor was then connected to the Arduino board using three jumper wires: the power plug connected to the 5V pin, the ground plug to the GND pin, and the control plug to pin No. 7. Servo motor movements were observed and recorded as the hand opened and closed.
During the initial stages of this experiment, a problem emerged: the servo motor oscillated continuously as soon as its control plug was connected to the Arduino board, even without any input from the subject’s left hand. To address this problem, three methods were tested:
The first method was to modify the program code, dividing the output value sent to the servo by 2 if it is within a certain range to ensure small oscillations do not affect the servo movement. Although this method reduced some random movements, it did not resolve the issue completely.
The second method was to adjust the program code, configuring the servo motor to receive the same output if the difference between two consecutive output values is insufficiently large. Additionally, connect the servo motor’s power plug to the 3.3V pin of the Arduino board. While this approach reduced random movements further, it did not meet satisfactory standards.
The third method was to connect the two REF pins together, which proved to be the most effective solution.
Subsequently, maintaining the system hardware unchanged, a new program with additional modifications was compiled and uploaded to the Arduino board. It implements a PD controller by defining the PD controller parameters and updating it in the ISR. Servo motor movements were again observed and recorded as the hand opened and closed.
3.3. Task 3
In this task, servo motor movements were observed and recorded as the test subject’s left hand opened and closed just as same as the process in Task 2. What’s different this time is that the measurements were taken at four critical time points before and after the test subject doing a workout exercise of a certain time period and type. The four time points are 15 minutes before the workout started, and 5 minutes, 15 minutes and 30 minutes after the workout ended, respectively.
The test subject underwent the entire workout and measurement process in all trials: his muscle response was taken and recorded, and he began doing the given workout 15 minutes later. After the workout finished, the test subject sat down and rested for 5 minutes, and then had his muscle response taken and recorded. He took another two measurements after 15 minutes and 30 minutes of sitting at rest.
The first part of the task explored how the time of a workout influences muscle response to hand closing and opening by comparing two trials with the same workout type but different workout times. The workout type was treadmill hill walking with a velocity of 5km/h and an incline of 8 percent, and the workout times were 30 minutes and 1 hour, respectively.
The second part of the task explored how the type of workout influences muscle response to hand closing and opening by comparing three trials with the same workout time but different workout types. The first trial was the same as the first trial in the first part: 30 minutes of treadmill hill working and four measurements. In the second trial, the test subject’s workout was 30 minutes of elliptical training on an elliptical machine, at an approximately constant speed of 5km/h. In the third trial, the test subject underwent 30 minutes of strength training with the following form: 15 times for each set, 4 sets for each action, 15 seconds of rest between each set in the same action, and 1 minute of rest between each action. Thus, the 30 minutes workout contained 6 actions.
4. Results
4.1. Task 1
In Part 1 of this task, the observed phenomenon is that the frequency remains relatively stable, while the amplitude increases when the fist is clenched. Two screenshots from the ElecGuru40 software, showing data for when the fist is open and clenched, are included below.
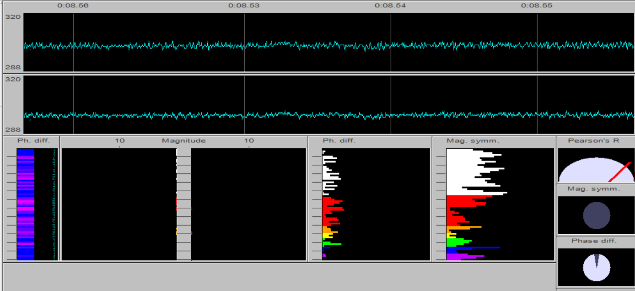
Figure 2: The ElecGuru 40 readings when the fist is open.
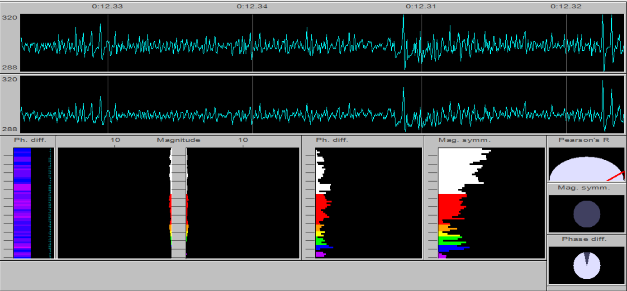
Figure 3: The ElecGuru 40 readings when the fist is clenched.
In Part 2, 0.000519126 V is the unamplified RMS voltage value when the fist is open, and 0.000552618 V is the value when the fist clenches. Figures 4 and 5 are two screenshots from the serial plotter that display data for both open and clenched fists.
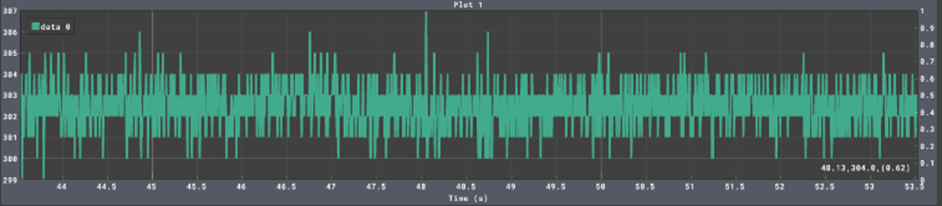
Figure 4: The serial plotter when the fist is open.
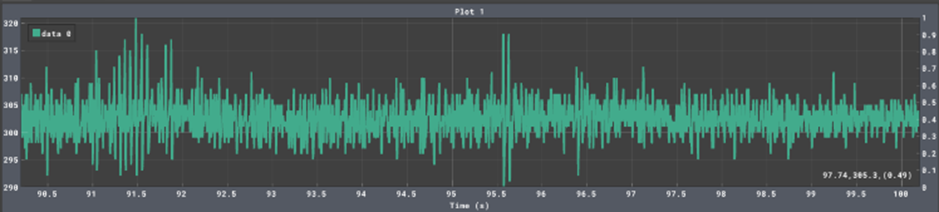
Figure 5: The serial plotter when the fist is clenched.
4.2. Task 2
Figure 6 is a plot that illustrates the movement of the servo motor over an extended period.
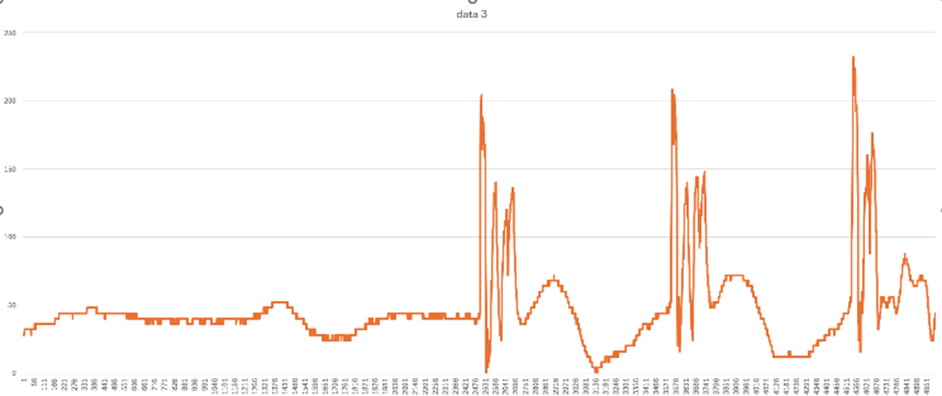
Figure 6: The plot of servo motor movements over an extended period.
After incorporating PD control in the program code, servo motor movements become more stable and less susceptible to interference. Figure 7 below illustrates servo motor movements over a longer period. Note the difference between the shapes of the two plots: the output stabilizes more quickly after each hand closure, and the oscillations between hand closures are smaller.
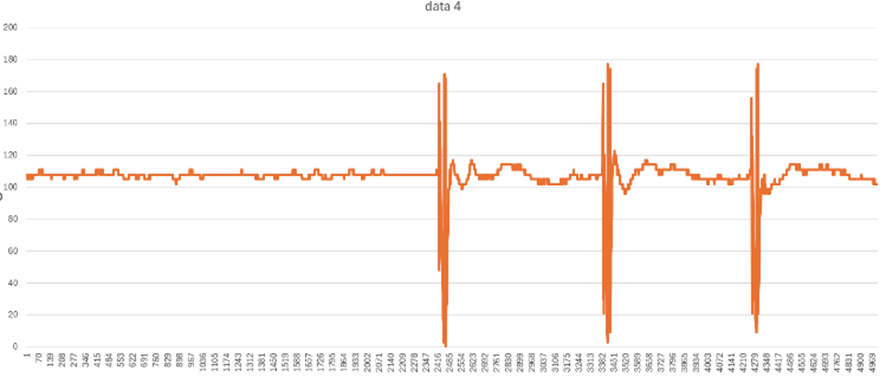
Figure 7: The plot of servo motor movements over an extended period after a PD controller was implemented in the code.
Figure 8 compares how the PD control affects servo motor movements by subtracting an offset in time for the first set of data.
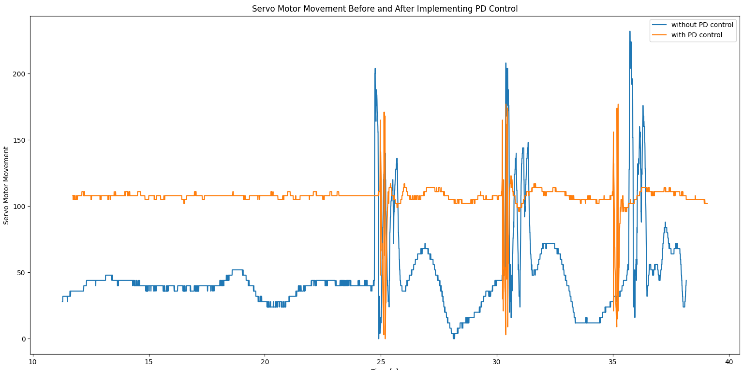
Figure 8: The plots of servo motor movements over an extended period before and after a PD controller was implemented in the code were compared.
4.3. Task 3
In this task, servo motor movements before and after various time and types of workout exercises are measured to determine the relationship between time and types of workout exercises and forearm muscle activities.
Due to the existence of two variables, the comparisons are in two parts: the first part demonstrating how workout time affects muscle response under the same workout type, the second part demonstrating how workout type influences muscle response while keeping the workout time the same.
Part 1
Figure 9 below shows servo motor movements stimulated by the test subject’s left hand closing and opening at four time points before and after 30 minutes of treadmill hill working: 15 minutes before workout started and 5 minutes, 15 minutes and 30 minutes after workout ended. In this plot and all comparisons plots below, the times have been subtracted a constant to show the part where servo motor movements changed significantly due to feedback from the subject’s left hand closing and opening.
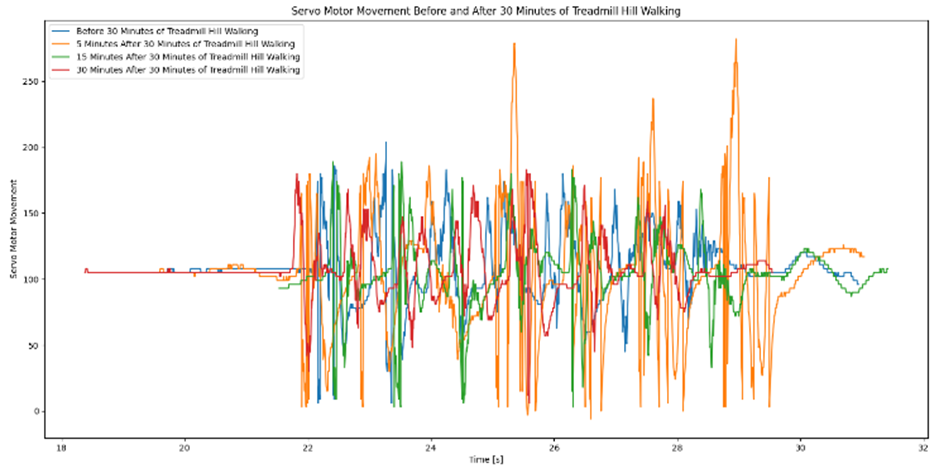
Figure 9: The plots of servo motor movements at four time points before and after 30 minutes of treadmill hill walking.
From this figure it can be concluded is that sEMG signals collected from the test subject’s left forearm muscles had the most prominent response to left hand closing and opening 5 minutes after 30 minutes of treadmill hill walking, while the muscle response had reduced tangibly (especially during the period from 25s to 30s) 15 minutes after the workout ended, and, after 30 minutes of sitting rest, reduced to about the same level as the response before the workout.
Figure 10 below shows servo motor movements stimulated by the same test subject’s left hand closing and opening after 1 hour of the same treadmill hill walking workout. The measurements were at the same four times: 15 minutes before the workout started and 5 minutes, 15 minutes and 30 minutes after the workout ended.
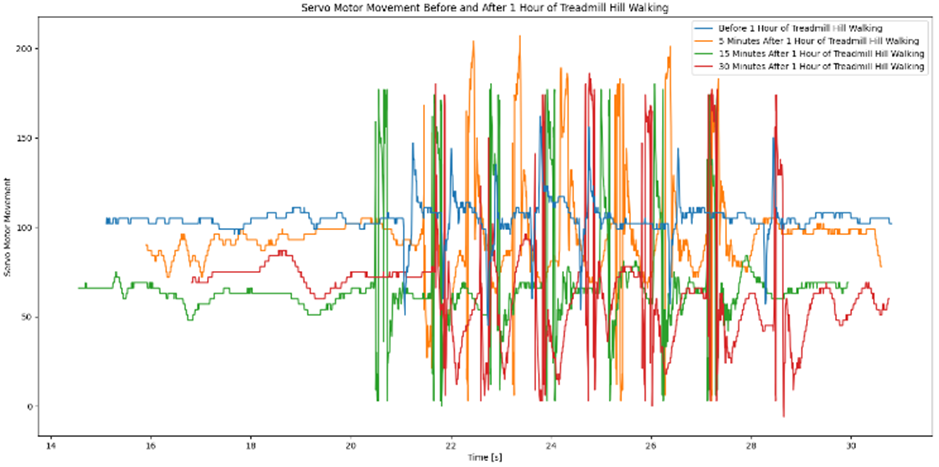
Figure 10: The plots of servo motor movements at four time points before and after 1 hour of treadmill hill walking.
This plot demonstrates that sEMG signals gave significantly stronger feedback to hand closing and opening 5 minutes after the workout ended compared to 15 minutes before the workout started, as same as the case in the 30 minutes treadmill hill walking. What’s different is that the muscle response 5 minutes after the workout was weaker than 5 minutes after 30 minutes of workout, presumably due to the muscle already fatigued enough after 30 minutes of exercises. The muscle response 15 and 30 minutes after the workout, however, did not weaken as it did in the case of 30 minutes of workout.
Figure 11 below compares servo motor movements at the same three time points for 30 minutes and 1 hour of the same type of workout exercise.
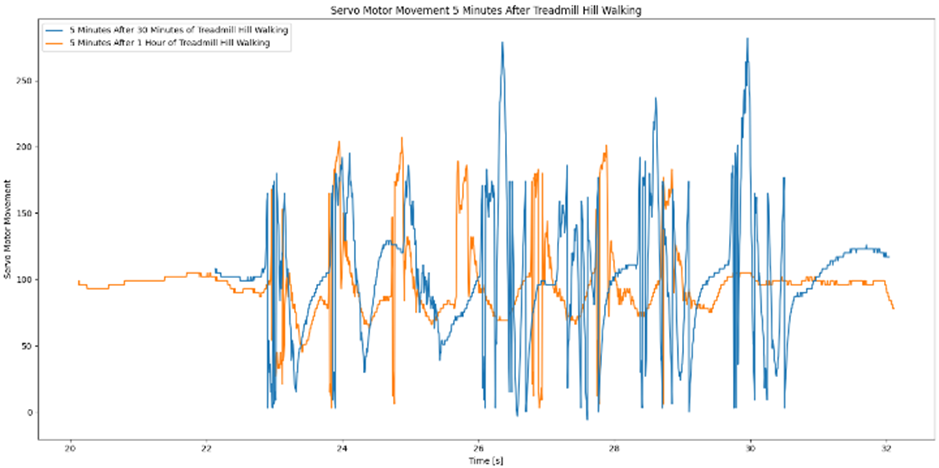
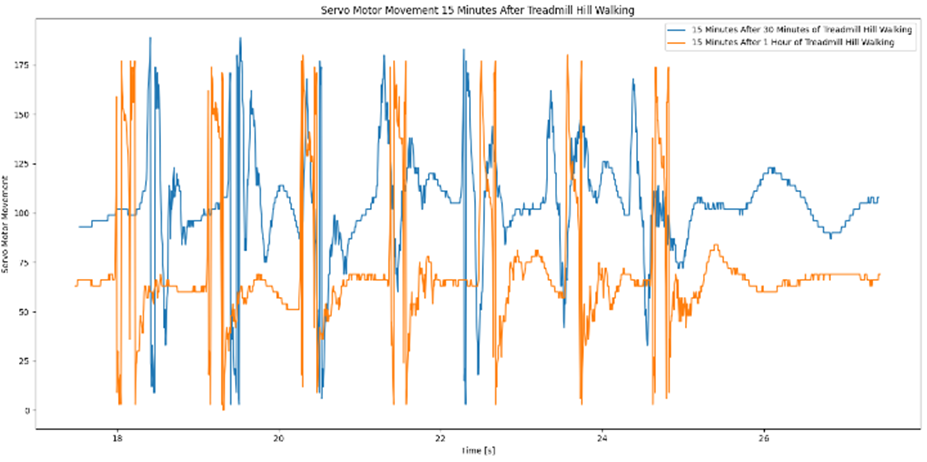
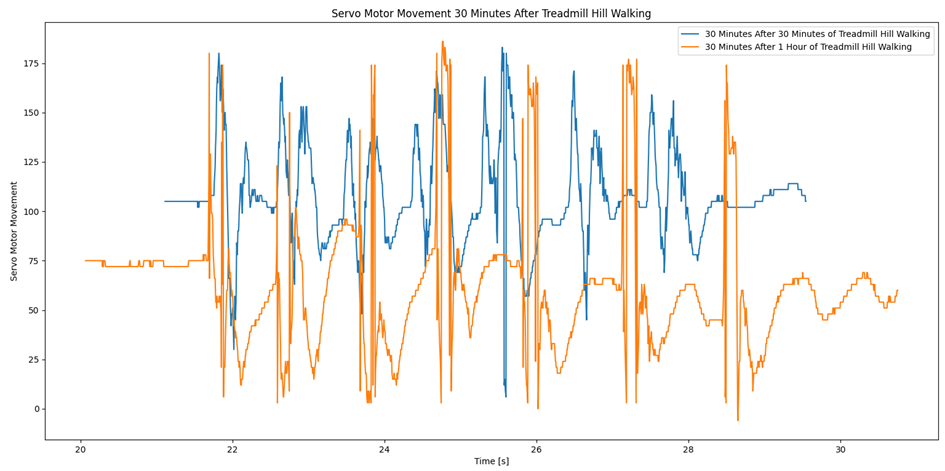
Figure 11: Three plots of servo motor movements at three time points after 30 minutes and 1 hour of treadmill hill walking respectively. The three points are: (a) 5 minutes after the workout; (b) 15 minutes after the workout; (c) 30 minutes after the workout.
From Figure 11 it is clear that compared to 30 minutes of treadmill hill walking, 1 hour of the same type of workout leads to a weaker muscle response to stimulation and fails to keep the forearm muscle at the same level of excitation; it, however, keeps the muscle activities excited for a longer duration, as the muscle response does not weaken even after 30 minutes of sitting rest. This suggests that extending the time of one workout does not necessarily lead to better results, as workout exercises as long as 1 hour lead to a lower level of muscle excitement, but longer time needed for alleviating muscle fatigue.
Part 2
In this part, servo motor movements at the same four points are compared according to the type of workout done between the first measurement and the other three. The workout time, as described in Section III, is the same across all workouts.
Figure 12 below shows how 30 minutes of elliptical training and 30 minutes of strength training influence left forearm sEMG signal response to hand closing and opening respectively.
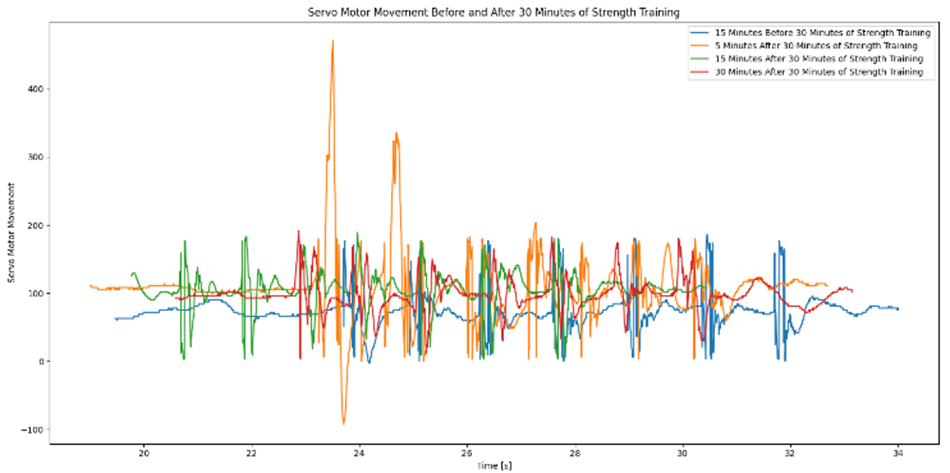
Figure 12: Two plots of servo motor movements at four time points before and after 30 minutes of (a) elliptical training and (b) strength training respectively.
These two plots demonstrate that sEMG signals change after 30 minutes of elliptical training and strength training respectively similarly to that of 30 minutes of treadmill hill walking: all responses to hand closing and opening become stronger 5 minutes after the workout but decreases with time.
There exists differences between three types of workout on how muscle response and activities change with time, however: elliptical training has the least tangible effect on muscle response compared to the situation before workout, as the curve does not change quite tangibly after the workout, but the muscle excitation keeps constant as time passes, while strength training has the most prominent immediate effect on muscle response, as shown here by the incredible wave crest around 23.5s, but the muscle response drops to the same level before workout as soon as 15 minutes after the workout, and, after 30 minutes passed after the workout, even decreases lower than the level before.
Figure 13 below compares servo motor movements at the same three time points for three workout exercises of the same time but different types.
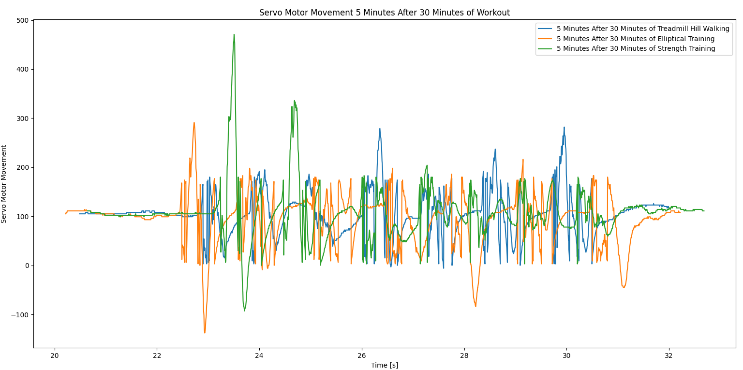
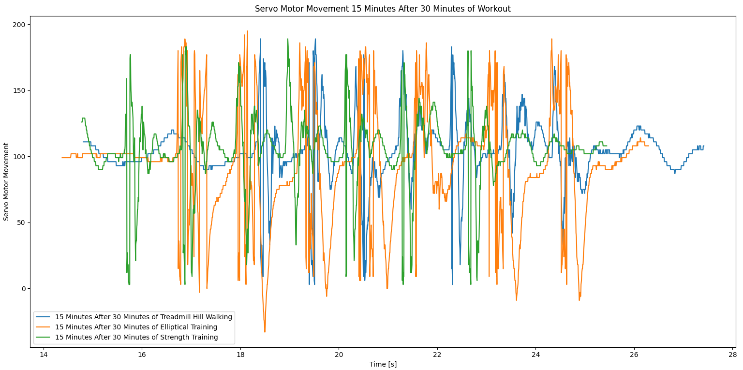

Figure 13: Three plots of servo motor movements at three points after 30 minutes of treadmill hill walking, elliptical training, and strength training respectively.
Figure 13 suggests that compared to 30 minutes of treadmill hill walking, the same time of elliptical training produced a less excited muscle response in short time which nevertheless proved to be more stable in the long run. Strength training, on the other hand, produced the most exciting muscle activities immediately after the workout ended, but its stimulation quickly wore off and the muscle response after 30 minutes was even lower than that before the workout.
5. Discussion
The feedback system described in this study demonstrated the capability to effectively receive, process, and utilize sEMG signals for real-time servo control. The overall performance of the system, as observed during the experiments, highlights both its effectiveness and areas for improvement.
The system successfully captured sEMG signals from three strategically placed electrodes on the forearm, allowing for monitoring of muscle activity associated with hand movements. Task 1 accurately converted the analog signals into digital values, and the RMS voltage values provided a quantitative measure of muscle activity. The observed increase in amplitude with a clenched fist compared to an open fist demonstrated the system’s sensitivity to changes in muscle activity.
Task 2 validated the system's ability to translate the RMS voltage values into servo motor positions. Continuous oscillations in the servo motor movement challenged the initial setup, but several methods mitigated the issue. The final solution, which involved connecting the REF pins on the Olimex shield, proved to be the most effective in stabilizing the servo’s movement.
The introduction of a PD controller further enhanced the system’s performance. The PD controller improved the stability of the servo motor’s movements, reducing oscillations and ensuring quicker stabilization after hand movements. The difference in the plots before and after implementing the PD controller highlights its effectiveness in refining the servo’s response.
While the PD controller significantly improved the system’s stability, further refinements could be made to optimize its performance:
The PD controller parameters (proportional and derivative gains) were set based on initial estimates. A more systematic approach to tuning these parameters, such as using methods like Ziegler-Nichols or optimization algorithms, could further enhance the controller’s performance.
To further improve the quality of the sEMG signal, advanced filtering techniques such as adaptive filters or wavelet transforms could be employed. These methods could help in reducing noise and improving the accuracy of the RMS voltage calculation, enabling more precise control of the servo motor.
Implementing a more sophisticated feedback loop that incorporates additional parameters or uses a combination of Proportional-Integral-Derivative (PID) control could offer better control over the servo motor’s movements. The integration of an integral term could help in addressing any steady-state errors that may exist with the current PD controller.
In Task 3, two variables that influence the effect of workout on muscle response and activities, namely the time and type of workout, were explored, and they were proved to be both relevant to the workout effect on muscle response. Improvements on trials, however, are still needed for further exploration into the effect of workout exercises on muscle response: the test subject was limited to only one person, and the ranges of both variables involved were also limited to only two or three situations. A sEMG measurement and servo motor system with higher accuracy and stability can also help in securing more accurate and reliable data for detailed analyses.
6. Conclusion
The feedback system successfully demonstrated its capability to translate sEMG signals into servo motor movements, providing a functional prototype for real-time muscle activity detection and control. While the system performed effectively in its current form, several avenues for improvement have been identified, particularly concerning the PD controller and signal processing techniques. The comparison trials were also a success, showing that muscle response to hand closing and opening are indeed affected by workout exercises, and both the time and type of workout are relevant to the effect. Improvements in both the conduction of trials and recording of data are needed, however, to ensure that valuable, accurate, stable and reliable data will be obtained for more comprehensive and detailed analyses. Future work should focus on refining these aspects to enhance the overall functionality and applicability of the feedback system.
Acknowledgments
X.Z. thanks Professor Kirill Aristovich and Zonghao Chen for their tireless help, without whom this paper and the study described in it would be impossible to complete.
References
[1]. Andersen, R. A., Aflalo, T., & Kellis, S. (2019). From thought to action: The brain–machine interface in posterior parietal cortex. Proceedings of the National Academy of Sciences of the United States of America, 116(52), 26274–26279. https://www.jstor.org/stable/26897092.
[2]. Huang, Q., Gao, M., Guo, M., Wei, Y., Zhang, J., & Jin, X. (2023). Vibration comfort assessment of tractor drivers based on sEMG and vibration signals. Computer Methods in Biomechanics & Biomedical Engineering, 27(13), 1875–1892. https://doi.org/10.1080/10255842.2023.2263126
[3]. Zhu, W., & Zhao, C. (2024). The assessment method of lip closure ability based on sEMG nonlinear onset detection algorithms. Biomedical Engineering / Biomedizinische Technik, 0(0). https://doi.org/10.1515/bmt-2024-0107.
[4]. Russo, A., Aranceta-Garza, A., D’Emanuele, S., Serafino, F., & Merletti, R. (2019). HDsEMG Activity of the Lumbar Erector Spinae in Violin Players: Comparison of Two Chairs. Medical Problems of Performing Artists, 34(4), 205–214. https://www.jstor.org/stable/48714402.
[5]. Hatamzadeh, M., Sharifnezhad, A., Hassannejad, R., & Zory, R. (2023). Discriminative sEMG-based features to assess damping ability and interpret activation patterns in lower-limb muscles of ACLR athletes. Biomedical Signal Processing and Control, 83, 104665. https://doi.org/10.1016/j.bspc.2023.104665.
[6]. Sgrò, F., Demeco, A., Marotta, N., Merati, G., Lipoma, M., Ammendolia, A., Costantino, C., & Iona, T. (2024). The Functional Assessment of the Shoulder in Water Polo Players with Surface Electromyography and Kinematic Analysis: A Pilot Study. Applied Sciences, 14(16), 7077. https://doi.org/10.3390/app14167077.
[7]. Oskar. (2022). UCL-MPHY0039 [Software]. GitHub. https://github.com/FlamingMaple/UCL-MPHY0039.
[8]. Sacks, R. (2002). ElecGuru40 [Computer software]. Olimex. https://www.olimex.com/Products/EEG/OpenEEG/EEG-SMT/resources/ElecGuru40.zip.
Cite this article
Zhang,X. (2025). Research on Precise Servo Control of Hand Motion Real-time Detection Based on Surface Electromyography Signals Integration and Analysis of Muscle Response to Workout Exercises. Theoretical and Natural Science,87,1-14.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Computing Innovation and Applied Physics
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Andersen, R. A., Aflalo, T., & Kellis, S. (2019). From thought to action: The brain–machine interface in posterior parietal cortex. Proceedings of the National Academy of Sciences of the United States of America, 116(52), 26274–26279. https://www.jstor.org/stable/26897092.
[2]. Huang, Q., Gao, M., Guo, M., Wei, Y., Zhang, J., & Jin, X. (2023). Vibration comfort assessment of tractor drivers based on sEMG and vibration signals. Computer Methods in Biomechanics & Biomedical Engineering, 27(13), 1875–1892. https://doi.org/10.1080/10255842.2023.2263126
[3]. Zhu, W., & Zhao, C. (2024). The assessment method of lip closure ability based on sEMG nonlinear onset detection algorithms. Biomedical Engineering / Biomedizinische Technik, 0(0). https://doi.org/10.1515/bmt-2024-0107.
[4]. Russo, A., Aranceta-Garza, A., D’Emanuele, S., Serafino, F., & Merletti, R. (2019). HDsEMG Activity of the Lumbar Erector Spinae in Violin Players: Comparison of Two Chairs. Medical Problems of Performing Artists, 34(4), 205–214. https://www.jstor.org/stable/48714402.
[5]. Hatamzadeh, M., Sharifnezhad, A., Hassannejad, R., & Zory, R. (2023). Discriminative sEMG-based features to assess damping ability and interpret activation patterns in lower-limb muscles of ACLR athletes. Biomedical Signal Processing and Control, 83, 104665. https://doi.org/10.1016/j.bspc.2023.104665.
[6]. Sgrò, F., Demeco, A., Marotta, N., Merati, G., Lipoma, M., Ammendolia, A., Costantino, C., & Iona, T. (2024). The Functional Assessment of the Shoulder in Water Polo Players with Surface Electromyography and Kinematic Analysis: A Pilot Study. Applied Sciences, 14(16), 7077. https://doi.org/10.3390/app14167077.
[7]. Oskar. (2022). UCL-MPHY0039 [Software]. GitHub. https://github.com/FlamingMaple/UCL-MPHY0039.
[8]. Sacks, R. (2002). ElecGuru40 [Computer software]. Olimex. https://www.olimex.com/Products/EEG/OpenEEG/EEG-SMT/resources/ElecGuru40.zip.