






1. Introduction
The application of bioelectrical signals, such as Electromyography (EMG) and Electromyography(EEG) has had a very beneficial impact on assistive devices, Medical Diagnostics, and Rehabilitation.
Currently, the combined use of EEG and EMG is mainly focused on the field of rehabilitation, for example, for the hand rehabilitation after stroke[1]. However, research that integrates both technologies remains relatively scarce, with a greater emphasis on studying each technique separately for their individual applications. Although both technologies involve the acquisition of human biological signals, processing the data, and utilizing the processed information for further applications, they each have their own disadvantages. Regarding EMG, since it captures muscle signals, the biological information it collects is relatively basic and low-level, and it cannot access higher-level information. On the other hand, EEG directly records signals from the cerebral cortex, providing more high-level information. However, compared to EMG, EEG signals are weaker, have longer delays in real-time data, and exhibit a high signal-to-noise ratio, which significantly increases the difficulty of data processing.
As the proportion of the elderly population continues to rise globally, particularly in regions with pronounced aging demographics such as Japan, Europe, and China, the demand for elderly care services has surged. The caregiving industry frequently faces labor shortages, especially in developed countries, which makes the application of assistive robots in this sector increasingly urgent. Elderly individuals can utilize these robots to perform tasks they may find difficult or impossible to complete on their own, such as lifting heavy objects or retrieving items from high places. Furthermore, it is not just the elderly who benefit; individuals with disabilities also rely on robotic assistance to carry out basic daily tasks.
The objective of the experiment illustrated in the essay is to utilize the muscle signals produced by opening and closing the palm to control the motor's rotation. This process exemplifies the practical application of biosignal acquisition and processing and holds significant potential for advancing prosthetic technologies and robotic systems designed to interface with and control human muscle activity. The underlying principles of this project closely align with those of electroencephalography (EEG), wherein electrodes are utilized to acquire bioelectrical signals from the human body, followed by signal processing and analysis. Therefore, this project provides valuable insights for future research in EEG and the integration of electromyography (EMG) with EEG, offering a foundation for exploring their combined applications in neuroprosthetics and brain-computer interface development.
This paper proposes that the integration of electromyography (EMG) and electroencephalography (EEG) for robotic control can facilitate the completion of daily tasks, offering valuable assistance to both disabled and elderly individuals. It argues that this approach holds significant potential for practical and beneficial applications in the future.
2. Literature Review
Electromyography (EMG) involves analyzing the mechanical characteristics of muscles both at rest and during contraction. The electrical signals produced by the muscles are captured using electrodes placed over the muscle site, which can either be intramuscular for direct recordings or surface electrodes for non-invasive measurements [2]. Surface electromyography (sEMG) is a non-invasive method used to assess muscle activity by placing surface electrodes on the skin above a specific muscle or group of muscles[3, 4]. This project involves using sEMG electrodes, an Arduino Uno and an EMG shield to control a servo motor.
A brain-computer interface (BCI) is a device that enables a person to control an external mechanical or electrical device using their thoughts. BCIs work by reading signals from the brain's neurons and converting them into actions through computer algorithms[5].Over the past few decades, brain–computer interfaces (BCIs) have emerged as one of the fastest-expanding technologies and a highly productive area of research. Usually, interacting with a computer involves using the hands, for example, to operate a mouse and keyboard, the eyes (such as in gaze tracking), or performing some physical action[6]. In BCI technology, one of the most important step is signal extraction from the brain. Brain signals can be captured through three distinct methods: invasive, partially invasive, and non-invasive techniques[5]. While both invasive and non-invasive BCIs provide higher quality signals, non-invasive BCIs are the safest among the three types. As a form of non-invasive BCIs, EEG-based BCIs are the most widely used due to their high temporal resolution, affordability, and ease of setup, despite having relatively low spatial resolution[7].The electroencephalogram (EEG) refers to the electrical activity of a fluctuating nature that is recorded from the scalp using metal electrodes and conductive materials[8]. EEG measures voltage fluctuations resulting from the flow of ionic currents within neurons in the brain. These EEG signals, or brainwaves, represent neural oscillations generated by the communication between neurons. Brainwaves are analyzed in the frequency domain, with their intensity measured in microvolts (µV) and frequencies typically ranging from 1 to 100 Hz. Based on their frequency, brainwaves are categorized into specific bands: delta (δ) (1–4 Hz), theta (θ) (4–7 Hz), alpha (α) (8–13 Hz), beta (β) (13–30 Hz), and gamma (γ) (>30 Hz)[7].
3. Methodology
The experiment employs a practical approach to evaluate hand pose recognition using surface EMG (sEMG) signals which are collected through electrodes placed on specific forearm muscles. This involves three main steps: electrode placement and EMG signal acquisition, data processing using Arduino for RMS voltage calculation, and motor control based on muscle activity. Data was collected from healthy adult participants, with ethical considerations including informed consent and minimizing discomfort during electrode application and motor control tests.
Initially, the EMG board is interfaced with the Arduino Uno, as illustrated in Figure 1. The EMG board connects a lead with three electrodes, and electrode patches affix these electrodes to various sites on the arm. The yellow electrode is positioned at the elbow joint to provide a grounding reference. This configuration facilitates the acquisition of muscle signals. Figure 2 details the locations of the remaining two electrodes. To effectively assess hand pose (open and closed) using surface EMG (sEMG) electrodes, the electrodes are strategically placed on specific muscles in the forearm. The first active electrode is placed on the flexor digitorum superficialis muscle, which is centrally located on the palm side of the forearm. This muscle is primarily responsible for finger flexion, making it ideal for detecting the closing motion of the hand. The extensor digitorum muscle, located on the dorsal side of the forearm, receives the second active electrode. This muscle is involved in finger extension, crucial for detecting the opening motion of the hand. The reference electrode is placed on the elbow to minimize noise and artifacts in the EMG signal, providing a stable baseline for measurements.


Figure 1: placement of EMG and Arduino Figure 2: placement of EMG on arms
To analyze the EMG signals, the Serial Monitor in the Arduino IDE is opened and the waveform fluctuations are observed as the hand is alternately opened and closed. The waveform exhibits distinct patterns: when the hand is tightly clenched, the signal waveform reaches its peak, indicating high muscle activity; conversely, when the hand is fully relaxed, the waveform descends to its lowest point, reflecting minimal muscle engagement. By systematically repeating the hand opening and clenching actions, data can be collected that represents muscle activity across various force levels. The Arduino then processes this data to calculate the RMS voltage from the EMG signal.
Wires connect the motor to the EMG board after converting the signal from the EMG into RMS voltage values. The motor’s three terminals should correspond to the 5V, ground, and signal3 connections on the EMG board, respectively. The RMS voltage values will then control the motor's rotational position. The protruding part of the motor connects to a steering gear, which rotates the motor to different positions. This is shown in figure3.
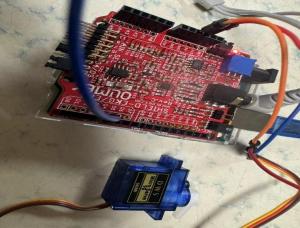
Figure 3: connection between motor and EMG board
The rotation of the servo motor generates noise, which can affect the motor's operation, causing persistent, minor, and irregular disturbances. Consequently, an attempt was made to use MATLAB for noise reduction and filtering.
4. Results
Figure 4 displays the readings from the Serial Monitor in Arduino, showing both the RMS voltage values and the corresponding angles traversed by the motor. As observed in Figure 4, the deflection angle of the motor's mechanical arm varies in response to changes in the RMS value, which represents the fluctuations in muscle electrical signals. The larger the RMS value, the greater the deflection angle of the motor. Figure 5 illustrates the fluctuations in the RMS signal, after noise reduction and filtering in MATLAB, as it responds to varying muscle exertions during hand clenching and opening. It can be observed that the RMS waveform reaches its peak when the hand is clenched tightly and drops to its lowest point when the hand is relaxed. MATLAB filtering reveals a more regular pattern in the waveform of the RMS value.
For the motor, a larger RMS voltage corresponds to a greater rotation angle, resulting in a larger range of motion. In other words, the stronger the muscle exertion and the higher the muscle signal strength, the greater the motor’s angular displacement. Therefore, as the hand opens and clenches, the servo motor rotates back and forth accordingly. However, because of the test subject's relatively weak muscle signals, the servo motor's range of motion is also limited.
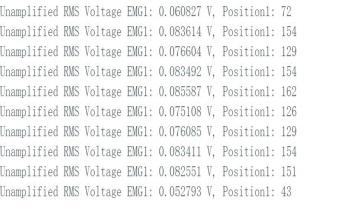
Figure 4: RMS Voltage and Motor Angle Readings
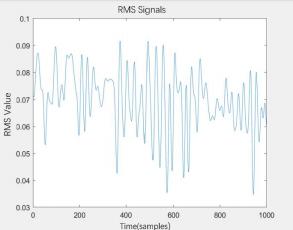
Figure 5: Filtered RMS Signal according to Muscle Exertion
5. Discussion
The experiment encountered four primary challenges. Firstly, noise interference affected the motor's performance, resulting in constant, small, and irregular rotations. Secondly, the motor occasionally failed to operate correctly due to poor connections. Thirdly, the muscle contractions and relaxations did not generate sufficiently sensitive electrical signals to produce significant motor movement. Setting the EMG sensitivity too high allowed even a slight touch on the wires to trigger the motor to turn. Additionally, the Arduino IDE program occasionally experienced malfunctions. The author implemented several solutions to address these issues: using MATLAB for noise reduction, expanding and relaxing the arm to observe significant waveform changes in MATLAB's plotter, adjusting muscle contractions to arm swings, avoiding excessively high EMG sensitivity, and finally, unplugging and re-plugging the Arduino or restarting the program when other problems persisted.
Both EMG and EEG signals can be used to detect motion intention, but each method has its drawbacks. EEG signals can be challenging to decode because they do not always directly reflect muscle activity. On the other hand, muscle fatigue and other factors can influence EMG signals, altering their direct measurement of muscle activity. A potential way to overcome these limitations is to combine EEG and EMG signals, allowing each to offset the other's weaknesses. By using two classifiers, one for each signal type, and merging their outputs, it may be possible to achieve greater accuracy in determining motion intention than by relying on either EEG or EMG alone[9].
For EEG, signals are typically in the range of microvolts (µV) while for EMG, signals are generally in the range of millivolts (mV). This indicates that the signal strength obtained from EMG is stronger than that from EEG. Additionally, since surface EEG (sEEG) operates through the scalp, it has a lower signal-to-noise ratio. EMG, on the other hand, directly collects muscle signals, resulting in stronger and higher-quality signals. The delay in signal acquisition for EEG is longer compared to EMG, making EMG more suitable for rapid signal collection. However, the signals captured by EMG are primarily simple muscle signals, whereas EEG captures more profound brain signals, which can provide a deeper complement to the EMG signals.
However, despite the apparent naturalness and effectiveness of their integration, the use of EEG and EMG signals has only received limited exploration, particularly in combined applications[10]. Existing literature clearly indicates that techniques with combination of EEG and EMG provide essential and complementary insights into various aspects of neuromotor assessment. Studies have demonstrated their ability to deepen our comprehension of central nervous system pathologies that lead to motor deficits, especially from a neuromotor viewpoint. The combined use of EEG and EMG also offers valuable information that aids in personalizing and tailoring therapies, giving clinicians critical data on motor organization to support treatment decisions[10].
Based on the operational principles of this experiment, this article proposes the concept of integrating EEG and EMG for controlling a robot. The accompanying conceptual image as shown in figure 6, generated by ChatGPT, illustrates a user wearing an EEG device on their head and an EMG sensor on their arm, both of which are utilized to control a robotic arm. The elderly individual's EEG helmet captures the brain's electrical activity signals, reflecting the user's intent to move the robot. By decoding these signals, the user's brain activity can be translated into commands to control the robotic arm. The EMG sensors attached to the individual's arm monitor the electrical activity of the muscles. These sensors detect the contraction and relaxation of arm muscles, providing information about actual muscle movements. By combining EMG signals, the robotic arm can more accurately respond to the user's intended actions. For example, when the user attempts to grasp an object, the robotic arm can adjust its grip strength based on the intensity of the EMG signals. In the illustration, the elderly individual may convey intent through EEG signals, while EMG signals offer feedback on actual muscle movements, enabling the robotic arm to perform more complex and precise tasks, such as assisting the individual in picking up or setting down objects. The combination of EEG and EMG can be applied not only to elderly individuals but also to those with mobility impairments.
Considering the issue of portability in practical use, this paper also proposes the idea of integrating EEG, EMG, and wearable devices. The concept involves designing EEG and EMG equipment in a more streamlined manner by embedding electrical electrodes into wearable devices. By this way, the user would only need to wear a headpiece and an armband to begin detecting their biological signals. This design would make the device easier to operate, more convenient for users, and likely increase its adoption and accessibility. With an aging population and a growing number of people with disabilities, this device has significant potential. It could assist a large number of people in addressing various daily challenges.

Figure 6: A6I generated conceptual figure
6. Conclusion
The integration of EEG and EMG signals presents a promising approach to overcoming the limitations inherent in using each method individually. By leveraging the strengths of both signals, it is possible to achieve more accurate and responsive control mechanisms, particularly in applications such as neuroprosthetics and assistive robotics. Furthermore, the concept of combining EEG, EMG, and wearable devices offers an exciting opportunity to create more accessible and user-friendly interfaces. These advancements could have a significant impact on the lives of individuals with mobility impairments or those who require assistive technologies, offering them greater independence and improving their quality of life.
References
[1]. Baniqued, P.D.E., et al., Brain–computer interface robotics for hand rehabilitation after stroke: a systematic review. Journal of neuroengineering and rehabilitation, 2021. 18: p. 1-25.
[2]. Reilly, R.B. and T.C. Lee, Electrograms (ECG, EEG, EMG, EOG). Technology and health care, 2010. 18(6): p. 443-458.
[3]. Drost, G., et al., Clinical applications of high-density surface EMG: a systematic review. Journal of Electromyography and Kinesiology, 2006. 16(6): p. 586-602.
[4]. Hermens, H.J., et al., Development of recommendations for SEMG sensors and sensor placement procedures. Journal of electromyography and Kinesiology, 2000. 10(5): p. 361-374.
[5]. Bogue, R., Brain‐computer interfaces: control by thought. Industrial Robot: An International Journal, 2010. 37(2): p. 126-132.
[6]. Sibilano, E., et al., Brain–Computer Interfaces, in Psychophysiology Methods. 2023, Springer. p. 203-240.
[7]. Korovesis, N., et al., Robot motion control via an EEG-based brain–computer interface by using neural networks and alpha brainwaves. Electronics, 2019. 8(12): p. 1387.
[8]. Teplan, M., Fundamentals ofEEG measurement. Measurement science review, 2002. 2(2): p. 1-11.
[9]. Tryon, J., E. Friedman, and A.L. Trejos. Performance evaluation of EEG/EMG fusion methods for motion classification. in 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR). 2019. IEEE.
[10]. Brambilla, C., et al., Combined use of EMG and EEG techniques for neuromotor assessment in rehabilitative applications: A systematic review. Sensors, 2021. 21(21): p. 7014.
Cite this article
Liang,P. (2025). Integration of Electroencephalography with Electromyography and Wearable Devices: A Concept Based on Experimental Investigations Utilizing Electromyogram Signals for Motor Function Control. Theoretical and Natural Science,84,51-57.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Computing Innovation and Applied Physics
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Baniqued, P.D.E., et al., Brain–computer interface robotics for hand rehabilitation after stroke: a systematic review. Journal of neuroengineering and rehabilitation, 2021. 18: p. 1-25.
[2]. Reilly, R.B. and T.C. Lee, Electrograms (ECG, EEG, EMG, EOG). Technology and health care, 2010. 18(6): p. 443-458.
[3]. Drost, G., et al., Clinical applications of high-density surface EMG: a systematic review. Journal of Electromyography and Kinesiology, 2006. 16(6): p. 586-602.
[4]. Hermens, H.J., et al., Development of recommendations for SEMG sensors and sensor placement procedures. Journal of electromyography and Kinesiology, 2000. 10(5): p. 361-374.
[5]. Bogue, R., Brain‐computer interfaces: control by thought. Industrial Robot: An International Journal, 2010. 37(2): p. 126-132.
[6]. Sibilano, E., et al., Brain–Computer Interfaces, in Psychophysiology Methods. 2023, Springer. p. 203-240.
[7]. Korovesis, N., et al., Robot motion control via an EEG-based brain–computer interface by using neural networks and alpha brainwaves. Electronics, 2019. 8(12): p. 1387.
[8]. Teplan, M., Fundamentals ofEEG measurement. Measurement science review, 2002. 2(2): p. 1-11.
[9]. Tryon, J., E. Friedman, and A.L. Trejos. Performance evaluation of EEG/EMG fusion methods for motion classification. in 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR). 2019. IEEE.
[10]. Brambilla, C., et al., Combined use of EMG and EEG techniques for neuromotor assessment in rehabilitative applications: A systematic review. Sensors, 2021. 21(21): p. 7014.