


Volume 134
Published on September 2025Volume title: Proceedings of CONF-APMM 2025 Symposium: Controlling Robotic Manipulator Using PWM Signals with Microcontrollers
Aiming at the fault diagnosis problem of oil-immersed transformers, this paper proposes a transformer oil dissolved gas analysis (DGA) fault diagnosis method based on the XGBoost algorithm. Traditional diagnostic methods have defects such as vague boundary values and poor interpretability. However, the XGBoost algorithm can effectively capture the nonlinear relationship between DGA data and fault types by iteratively optimizing the additive model. In the study, 1260 sets of DGA data were preprocessed, including mean normalization to eliminate the influence of dimensions, construction of gas ratio features to enhance sensitivity, and conversion of fault types into numerical labels. The model was optimized by setting hyperparameters such as learning_rate and max_ depth, and using 5-fold cross-validation and early stopping mechanism. Experimental results show that the accuracy of the XGBoost model on the test set reaches 93.6%, which is significantly higher than that of LSTM (82.3%) and PSO-LSTM (85.7%), and the RMSE and MAE indicators are better. The research shows that this method can accurately diagnose transformer faults and provide effective technical support for the safe operation of power systems.



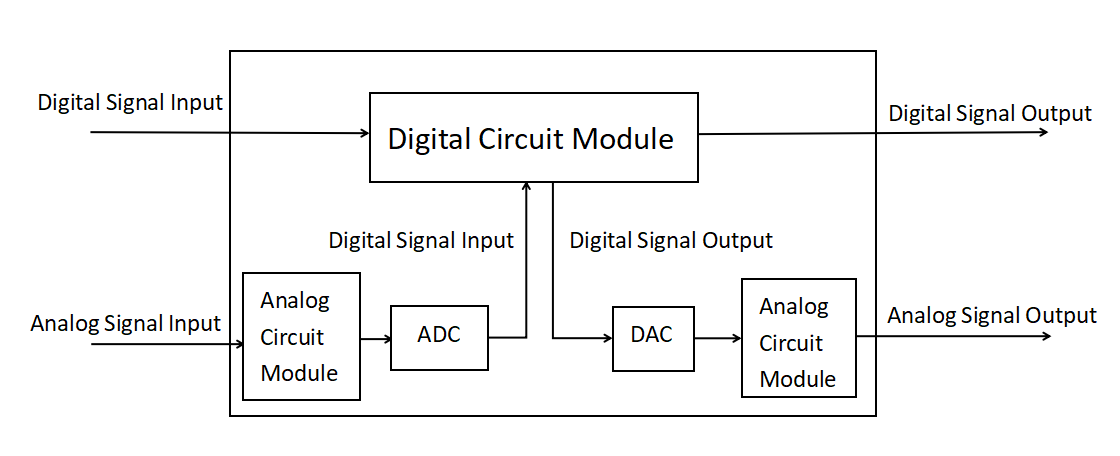
With the continuous advancement of modern electronic technology, analog and digital circuits are increasingly being supplanted by analog-digital mixed signal circuits, which have the advantages of both, so the development of integrated circuits focuses on analog-digital mixed signal circuits. This paper employs a comprehensive research approach, combining literature review and case studies, to conduct an in-depth exploration of analog-digital mixed-signal circuit design in ICs. First, the paper discusses the definition of analog-digital mixed circuits, analyses the application of analog-digital mixed circuits in the field of communications, automotive and other areas and development trends. This text explores the design challenges of analog-digital mixed circuits, including noise interference, device mismatches, process bias, and low power consumption. It also discusses the integration of analog-digital mixed circuits in integrated circuits and highlights recent advancements in analog-digital hybrid circuit design, such as new circuit architecture and packaging processes.
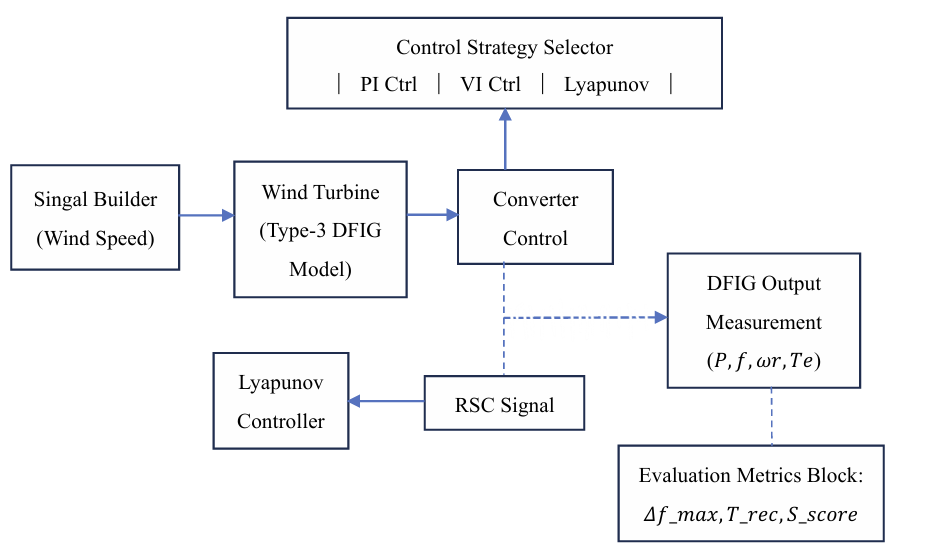
With the weakening of system inertia caused by the high proportion of renewable energy access, the frequency regulation in power systems is facing severe challenges. As a typical Inertia-less Power source, wind power must actively participate in frequency control to enhance grid stability. This paper proposes a Lyapunov-based frequency control strategy for Doubly-Fed Induction Generators (DFIGs) to improve system frequency response and dynamic robustness. Compared to traditional PI and virtual inertia methods, the proposed control significantly reduces the maximum frequency deviation from 0.31 Hz to 0.19 Hz, shortens the recovery time from 4.2 s to 2.18 s, and improves the overall system stability score from 6.5 to 9.4. By constructing the electrical and mechanical models of DFIGs and designing a state feedback controller, we validate the effectiveness of the proposed strategy through MATLAB/Simulink simulations. The results demonstrate superior performance over traditional PI control regarding response speed and frequency stabilization across multiple operating conditions.
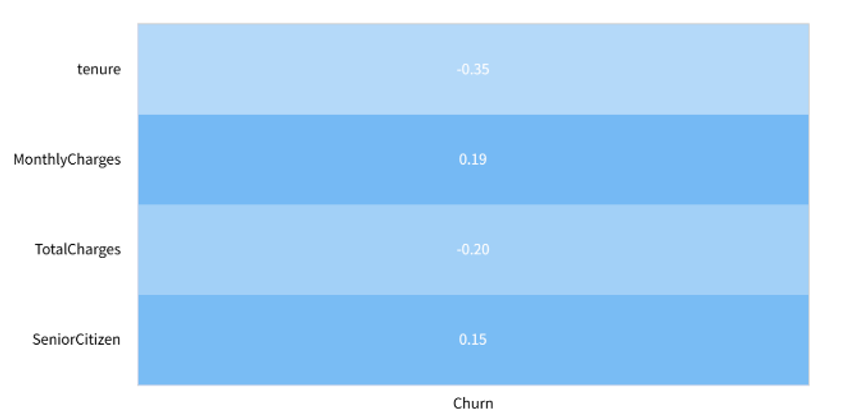
Customer churn has consistently been a significant issue within the telecommunications sector. The timely and accurate identification of high-risk churn customers is essential for improving customer satisfaction and operational profitability. With the rise of data-driven decision-making, predictive modelling has become a critical tool for telecom operators to mitigate churn risks. This study leverages the publicly available Telco Customer Churn dataset from Kaggle and employs R to construct and evaluate three classical machine learning models: Logistic Regression, Decision Tree, and K-Nearest Neighbours (KNN). Then, after preprocessing, feature selection, and hyper-parameter tuning, the models are evaluated with score metric and multi-metric evaluation to predict customer churn. The results of the research showed that it is 81.1% accurate, 72.5% precise in accuracy and interpretability compared to other models since it is a very interpretable model, as you can see from the Receiver Operating Characteristic (ROC) curve also. All models have specific weaknesses in predicting churned users; however, as a whole, they manage to achieve good accurate results. This study can offer an empirical and technical foundation for southern industrial companies to analyze churn and do data management, which is vital in the telecom industry.
With the acceleration of the global aging process, falls among the elderly have become a major public health issue threatening their health. Currently, the single sensor monitoring technology has significant limitations: the misjudgment rate of wearable accelerometers for daily activities, visual monitoring is significantly affected by light and there is a potential risk of privacy leakage, making it difficult to adapt to complex home scenarios. This paper reviews the research progress of real - time fall monitoring systems for the elderly based on multimodal sensor fusion, focuses on analyzing the collaborative mechanisms of millimeter - wave radar, accelerometers, and heart rate sensors, and summarizes key technologies such as data fusion architectures, algorithm optimization, and edge computing deployment. By comparing the performance differences of different fusion strategies, it is found that the three - level attention fusion architecture performs best in complex scenarios. At the same time, this paper points out problems in current research, such as the insufficient proportion of open - source data in home scenarios and the lack of night - time monitoring solutions, and looks forward to the future development direction of combining the Transformer architecture with privacy computing.
With the development of artificial intelligence, technological advancements have widely permeated the medical field, exerted a significant influence and played a crucial role in the diagnosis and treatment of gastrointestinal diseases. Artificial intelligence can quickly learn from expert experience, achieve wide-scale replication, work continuously and self-update. It can effectively alleviate the pain caused by gastrointestinal diseases and even help patients recover. This also significantly reduces the pressure on both doctors and patients. Doctors and experts can utilize artificial intelligence and 5G communication technology to remotely control surgeries, and precisely remove tumors, polyps and other issues within patients' bodies. This method can also enable experts to perform surgeries remotely, solving the problems of patients' mobility difficulties and the long distance between the two locations. Moreover, the quality of the surgeries has also been improved through technologies such as artificial intelligence. Based on the research results and the success rate of the surgeries, it has been concluded that through the application of artificial intelligence technology, long-distance surgeries can be conducted, and the results are basically the same as those of traditional surgical methods.
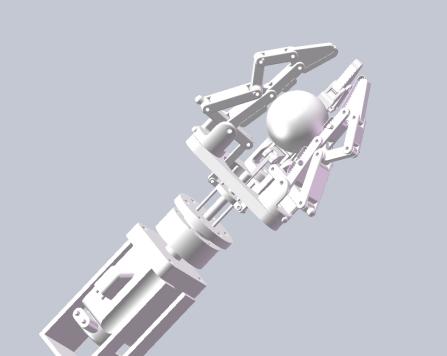
This article studies the problems of high labor intensity, low efficiency and high cost in manual fruit picking operations. Taking apples as the research object and utilizing the rapidly developing robot technology and computer technology, a bionic mechanical hand with force feedback was designed for agricultural harvesting applications. This equipment is equipped with an integrated force-sensing control system, aiming to minimize mechanical damage to fruits during the harvesting process as much as possible, while enhancing operational efficiency and reducing labor costs. This paper designs a force-sensing system. Through a series of high-precision sensors, the system can precisely detect and adjust the subtle pressure changes during the apple grasping process. This paper develops a bionic robotic arm model, featuring three core technological innovations. It designs a flexible underactuated finger mechanism with variable stiffness adjustment, which can achieve adaptive envelope grasping of irregularly shaped fruits. Therefore, the modular design of this system will allow for the scalable harvesting of various horticultural crops in the future, providing technical references for the development of smart agricultural equipment.
Chinese desert areas are rich in solar and wind energy resources, making them core areas for new energy development. However, extreme climate, geographical constraints, insufficient grid access and energy volatility pose higher demands on energy storage technology. Therefore, this paper will explore the optimization strategy of new energy storage technology in desert environment based on the actual situation. Based on national policy orientation, the current state of technology and the characteristics of the desert environment, this paper proposes an optimization strategy system covering technology paths, industrial chain coordination, policy mechanisms and ecological integration, and verifies its feasibility through case studies. This research results has shown that through material innovation, intelligent management and ecological synergy, the efficiency of new energy storage in deserts, the efficiency of energy utilization, and economic efficiency can be significantly improved. It is of great significance for promoting the coordinated development of ecological governance and regional economy, promoting the green transformation of energy, ensuring energy security, and facilitating the realization of the "dual carbon" goals.
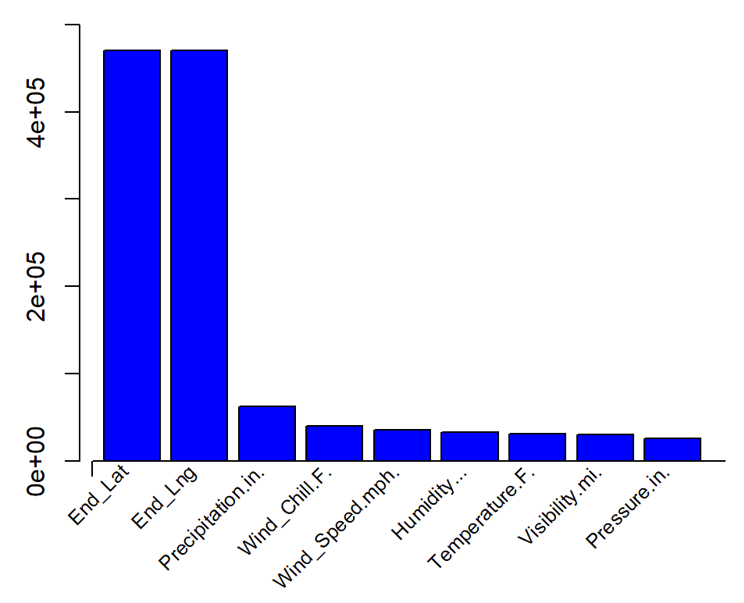
With the increase in global car ownership, the incidence of road traffic accidents is also rising. For the prediction and research of road traffic accidents risk, this paper considers weather factors and roadside facility factors, processes missing values in the samples, balances the sampling using the SMOTE method, and determines the optimal parameters. A roadside traffic accident risk prediction model based on Random Forest is established, mainly to predict the severity of traffic accidents and the duration of the impact of accidents. It is found that in weather factors, atmospheric pressure is the dominant factor for predicting accident severity, while precipitation is the dominant factor for predicting duration. Among the roadside facility factors, the prediction of accident severity and the duration of impact are both highly correlated with the presence of intersections and junctions nearby. Finally, this paper compares the fitting effect of Random Forest algorithm, Neural Network algorithm, Adaboost algorithm, Support Vector Machine algorithm, and XGboost algorithm on the model. The R2value of the Random Forest model is 0.833, which is the highest among all models. Therefore, the Random Forest model has the best fitting effect on the research problem.
Neuromorphic computing has gained increasing attention as a bio-inspired solution to the limitations of traditional computing systems in power and real-time constraints. In robotic control tasks, real-time processing and energy efficiency are crucial, especially for autonomous and mobile systems. Neuromorphic chips mimic the structure and operation of biological neurons, enabling low-latency and low-power processing. This review examines the architectures, performance benchmarks, and application cases of mainstream neuromorphic hardware platforms used in robotic perception and control. It also compare their energy consumption and latency with conventional control platforms. Furthermore, this paper identifies key challenges in system integration and suggests future directions including improved scalability, online learning, and the combination with edge AI frameworks. The paper finds that neuromorphic chips can significantly reduce energy consumption and improve real-time performance in robotic control. However, challenges in algorithm adaptation, standardization, and hardware integration remain. This study aims to provide researchers with insights into the practical implementation of neuromorphic control systems in energy-sensitive robotic applications.