






1. Introduction
The conventional upper-limb exoskeleton can be described as a wearable robotic arm that can match the movement of a human upper limb. Compared to the earlier end effectors, such as [1, 2], the exoskeleton can provide more flexible physical training, which is widely used in rehabilitation, including strength training to restore the upper body function of patients.
Researchers have been developing rigid exoskeletons in terms of rehabilitation use for decades. Commercial rigid upper-limb exoskeletons include HAL and Armeo Power [3, 4].
In 2013, the Biodesign Lab first proposed soft exosuits for locomotion assistance [5], which comprises a textile-based frame to reduce metabolic costs while walking. Since then, the studies of soft exosuits have drawn much attention.
Compared to the rigid exoskeleton, the soft exosuit introduces several advantages. For instance, the soft compliant frame can improve the wearer’s comfort, while the textile-based suit can adapt to various body shapes while improving portability by introducing lightweight. A comparison illustration between the rigid and soft exoskeletons is given in Fig. 1.
This paper reviews the recent studies of upper-limb soft exosuit, including the core technology that contains actuation, and controller design. A specific description of upper-limb soft exosuit is given in Definition 1.
Definition 1. An upper-limb soft exosuit indicates a wearable robotic device that provides external forces assistance to the user’s upper limbs, such as shoulders and elbows, to reduce the effort of muscles required to perform a physical task. It consists of a textile-based structure. The active exosuits are with actuators such as motors, while the passive ones can only transfer forces counting on their mechanical structure.
The paper is outlined as follows: in Section II, actuators, and control scheme designs that have recently been used in upper-limb soft exosuits were reviewed. Section III lists several challenges, and the conclusion is shown in Section IV.
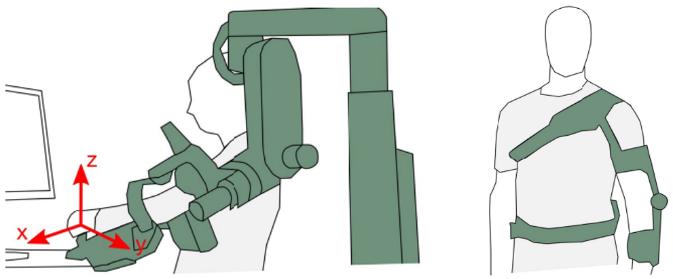
Figure 1. An example of rigid and soft exoskeletons [6]. Left: the rigid exoskeleton commonly attaches actuators to the rigid frames; right: the soft exosuit, which comprises soft compliant materials usually actuated by cable-driven or pneumatic.
2. Core Technologies
In this section, some core technologies of upper-limb soft exosuit are represented, which include (1) the actuators that are applied in hardware, and (2) the controller design. TABLE I shows several of the reviewed studies.
2.1. Actuation
2.1.1. Electric motor with cable-driven. As one of the mainstream solutions, electric motors are often combined with artificial tendons such as Bowden cables. The driving force can be transmitted by setting the anchor point in the part of the human body.
Compared to many rigid exoskeletons that directly attach motors aligned to body joints, the motor-tendon units can drive the joint in the far end, which is beneficial for flexible wearing. Also, electric motors make it easier to design a more accurate controller.
However, several drawbacks, including low mechanical efficiency, small load capacity, and the shear forces caused by cables, cannot be neglected during the design process. Fig. 2 demonstrates the use cases of the motor-tendon unit.
Nevertheless, the design of electric motors with artificial tendons has been used in various applications. Fig. 3 shows examples of the mechanical design of the electric motor-tendon unit.
Regarding the rehabilitation area, Galofaro et al. developed a hybrid assistive exosuit for neuromuscular electric stimulation [7]. Similarly, Burchielli et al. proposed an arm exosuit for functional electrical stimulation [8].
To reduce the workload and support activities of daily living, the researchers in [9] developed a compact exosuit for the shoulder and elbow, which improved the fitting and slipping issue on the user’s body. Missiroli et al. proposed a hybrid upper-limb occupational exoskeleton comprising a passive rigid spring-loaded structure for shoulder support and an elbow-soft exosuit with activated actuators [10]. The idea of hybrid architecture proposed a solution for not only gravitational support (rigid, passive frame) but also the dexterity of the wearer (soft compliant suit).
Table1. Soft exosuits for upper limb purposes.
Study | Publication Year | Actuator | Sensing | Low-level Controller | High-level Controller |
E.Galofaro et al. | 2022 | Motor-tendon unit | Force sensor | Velocity loop | PID admittance control |
D. Burchielli et al. | 2022 | Motor-tendon unit | Force sensor, Inertial Measurement Unit (IMU) | Velocity loop | PID admittance control |
F. Missiroli et al. | 2022 | Motor-tendon unit | Load cell, IMU | Velocity loop | Admittance control |
N. Lotti et al. | 2022 | Motor-tendon unit | Flex sensor | PID control | Admittance control |
R. F. Natividad et al. | 2021 | Pneumatic artificial muscles | IMU | — | — |
N. Tacca et al. | 2023 | Pneumatic artificial muscles | Force sensor | Model Predictive Controller | Gravity compensator |
L. Sy et al. | 2021 | Hydraulic artificial muscle | Optical encoder | — | — |
S. J. Park et al. | 2023 | Shape memory alloy | Surface electromyography (sEMG) | — | — |
F. Cleary et al. | 2023 | Textile | momentary textile sensors, momentary touch sensors | — | — |
A. Ghosh et al. | 2022 | Motor-tendon unit | Load cell | PID control | Adaptive CL-based gravity compensator |
To reduce the workload and support activities of daily living, the researchers in [9] developed a compact exosuit for the shoulder and elbow, which improved the fitting and slipping issue on the user’s body. Missiroli et al. proposed a hybrid upper-limb occupational exoskeleton comprising a passive rigid spring-loaded structure for shoulder support and an elbow-soft exosuit with activated actuators [10]. The idea of hybrid architecture proposed a solution for not only gravitational support (rigid, passive frame) but also the dexterity of the wearer (soft compliant suit).

Figure 2. Use cases of the electric motor-artificial tendon unit [10, 11].
Left: a soft robotic suit for whole-body assistance; right: a rigid-soft active-passive exosuit for Bimanual Multijoint Assistance.
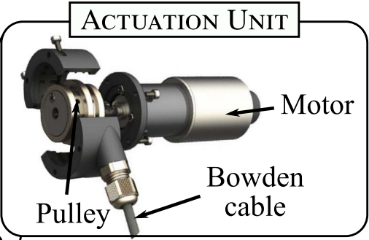
Figure 3. The actuation unit that is used in [12].
Pneumatic artificial muscles (PAMs) indicate a compliant pneumatic actuator with a proportional elongation to its interval pressure. The advantages of PAMs include small size, lightweight, and large power-to-weight ratio. However, on the other hand, it comes with downsides to precise control because of the large nonlinearities. Fig. 4 shows an example of PAMs in an upper-limb soft exosuit.
The researchers proposed a soft exosuit for the shoulder, which has 2 DoFs. The mechanical comprises multiple modules of pneumatic actuators [13]. Also, Tacca et al. presented a soft elbow exosuit to reduce the interaction torque.

Figure 4. An example of the PAMs actuation [13].
2.1.2. Hydraulic Artificial Muscle (HAM). Hydraulic artificial muscle has a similar structure to PAMs. Generally, the energy conversion efficiency of hydraulic drives is higher than that of pneumatic devices and can withstand large loads and torques [14]. However, hydraulically driven systems are prone to failures such as leaks.
Sy et al. proposed a hydraulic soft artificial muscle used in an assistive sleeve to reduce the workload of the operator’s muscles. In Fig. 5, the working principle of the soft muscle is represented [15].
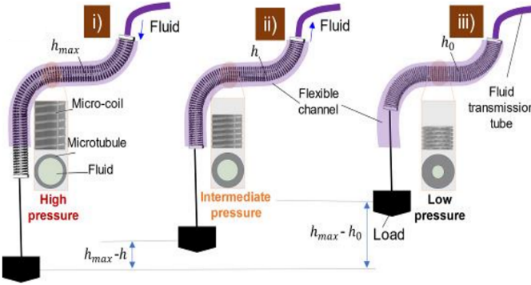
Figure 5. The working principle of the hydraulic soft artificial muscle that is used in [15].
2.1.3. Fiber Actuation. Fibre actuation is a relatively new design that usually employs new materials such as shape memory alloy (SMA) that can be fabricated as wearable external muscles. Fig. 6 illustrates the structure of the conductive SMA fibre muscle.
Park et al. proposed a lightweight (540g) upper-limb exosuit weaved by SMA springs [16]. The SMA fibres require heating to cause contraction. The experiment showed that the proposed exosuit could reduce the activity of muscles by around 50-70% with 50℃ controlled temperatures while holding a 10kg payload. Cleary et al. proposed a dynamic field-programmable logic-driven soft exosuit and applied momentary-based textile sensors in the garment to perform as actuators [17].
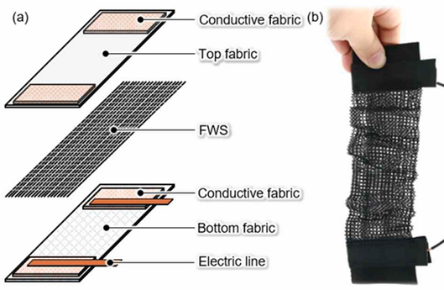
Figure 6. The conductive SMA fibre muscle structure used in [16]. The SMA was fabricated as a coil shape and the contraction will happen with the increasing temperature.
2.2. Controller
The control strategies can be categorized into low-level and high-level controllers. The purposes can be described as follows:
Low-level: to directly control the actuator.
High-level: to estimate the motion intention.
2.2.1. Low-level Control. Regarding the low-level controller design for motor-tendon units, the PID-like controller, such as a position control velocity loop, or feedforward controller, is usually applied, which might be due to its simplicity.
The control strategies for PAM, HAM, and fiber actuators are usually simpler due to the nonlinear response of soft materials. For instance, Park et al. controlled the SMA fibers by adjusting the voltages.
2.2.2. High-level Control. For some rigid exoskeletons that focus on rehabilitation, it is possible to allow the patients to be fully passive and follow the exoskeleton’s movement, which can cover the situations of heavy muscle weakness. However, an assumption used often in soft exosuits is that the suit does not provide sufficient force to carry the limb completely. Therefore, engagement from operators is often required.
One of the most common design principles of high-level control regarding the upper-limb soft exosuit is estimating the assistance torque, or desired torque through the kinematics model of the upper limb, and then comparing it with the actual measured torque directly from the sensors.
Admittance control took an important place in high-level control due to the requirements of human-machine interaction (see Fig. 7).
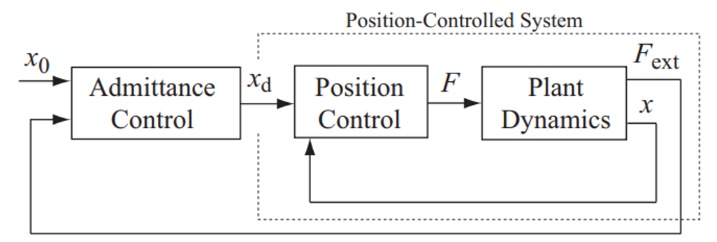
Figure 7. Implementation of admittance control [18].
Tacca et al. proposed a low-level model predictive controller (MPC) and a high-level gravity compensator to minimize the interaction torque between the wearer and exosuit. The researchers proposed an sEMG-based driven method, which used the sEMG signal as the wearer’s intention recognition. Samper-Escudero et al. developed a wearable shoulder-motion tracking system with multiaxial DoFs built with resistive sensors that made of flexible materials [19]. Ghosh et al. developed an adaptive concurrent learning (CL) based gravity compensator [20].
3. Challenges
Although the upper-limb soft exosuit has been experimented with and applied in many fields, some works remain challenging:
Soft exosuits can be treated as providing the wearer with external muscle to help the human body enhance bearing-load ability. Still, only a rigid exoskeleton can support and transmit the load. Therefore, a possible solution to break the constraints of different types of exosuits, combining rigid-soft becomes a critical issue in the future.
A more versatile soft upper-limb exosuits can improve the assistive ability for activities for daily life. For instance, only a few studies proposed multi-joint exosuits, which may be useful for complex works. Furthermore, most exosuits do not focus on the complex environment.
The development of actuators could be one of the breakthrough points. For example, with the increasing of DoFs, conventional solutions such as motor-tendon units could be heavier and lose portability. Although PAM has been widely deployed, the drawbacks cannot be ignored. Also, even though the fiber actuation has great potential, its usage in the commercial environment still awaits to be addressed.
4. Conclusion
This paper reviewed the current research state of upper-limb soft exosuit in recent years. The main efforts were grouped into the actuators and controller, respectively. Then, the challenges that must be addressed in future works were identified. Specifically, an exoskeleton combining rigid and soft structures and a new control scheme for increasing versatility may be critical for the current design. Furthermore, developing novelty actuators might bring new opportunities. By tackling the unsolved problems, there is a good chance that the upper-limb soft exosuit could impact society by expanding human body mobility.
References
[1]. M. Mihelj, T. Nef, and R. Riener, “A novel paradigm for patient-cooperative control of upper-limb rehabilitation robots,” Advanced Robotics, vol. 21, no. 8, pp. 843–867, 2007. doi:10.1163/156855307780851975
[2]. R. Morales, F. J. Badesa, N. García-Aracil, J. M. Sabater, and C. Pérez-Vidal, “Pneumatic robotic systems for Upper Limb Rehabilitation,” Medical & Biological Engineering & Computing, vol. 49, no. 10, pp. 1145–1156, 2011. doi:10.1007/s11517-011-0814-3
[3]. K. Yonezawa et al., “Extension force control considering contact with an object using a wearable robot for an upper limb,” 2013 IEEE International Conference on Systems, Man, and Cybernetics, 2013. doi:10.1109/smc.2013.606
[4]. V. Klamroth-Marganska, J. Blanco, K. Campen, A. Curt, V. Dietz, T. Ettlin, M. Felder, B. Fellinghauer, M. Guidali, and A. Kollmar, ‘‘Three dimensional, task-specific robot therapy of the arm after stroke: A multicentre, parallel-group randomised trial,’’ Lancet Neurol., vol. 13, no. 2, pp. 159–166, 2014.
[5]. A. T. Asbeck, R. J. Dyer, A. F. Larusson, and C. J. Walsh, “Biologically-inspired soft exosuit,” in IEEE International Conference on Rehabilitation Robotics, Seattle, WA, 2013.
[6]. T. Proietti, E. Ambrosini, A. Pedrocchi, and S. Micera, “Wearable robotics for impaired upper-limb assistance and rehabilitation: State of the art and future perspectives,” IEEE Access, vol. 10, pp. 106117–106134, 2022. doi:10.1109/access.2022.3210514
[7]. E. Galofaro, E. D’Antonio, N. Lotti, and L. Masia, “A hybrid assistive paradigm based on neuromuscular electrical stimulation and force control for upper limb exosuits,” 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), 2022. doi:10.1109/biorob52689.2022.9925466
[8]. D. Burchielli et al., “Adaptive hybrid fes-force controller for Arm Exosuit,” 2022 International Conference on Rehabilitation Robotics (ICORR), 2022. doi:10.1109/icorr55369.2022. 9896493
[9]. J. L. Samper-Escudero, S. Coloma, M. A. Olivares-Mendez, M. A. Gonzalez, and M. Ferre, “A compact and portable exoskeleton for shoulder and elbow assistance for workers and prospective use in space,” IEEE Transactions on Human-Machine Systems, pp. 1–10, 2022. doi:10.1109/thms.2022.3186874
[10]. F. Missiroli et al., “Rigid, soft, passive, and active: A hybrid occupational exoskeleton for bimanual multijoint assistance,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2557–2564, 2022. doi:10.1109/lra.2022.3142447
[11]. N. Lotti, E. Tricomi, F. Missiroli, X. Zhang, and L. Masia, “Machine learning techniques in soft robotic suits for whole Body Assistance,” 2022 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), 2022. doi:10.1109/dasc/picom/cbdcom/cy55231.2022.9927957
[12]. N. Lotti, E. Tricomi, F. Missiroli, X. Zhang, and L. Masia, “Machine learning techniques in soft robotic suits for whole Body Assistance,” 2022 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), 2022. doi:10.1109/dasc/picom/cbdcom/cy55231.2022.9927957
[13]. R. F. Natividad, T. Miller-Jackson, and R. Y. Chen-Hua, “A 2-DOF shoulder exosuit driven by modular, pneumatic, fabric actuators,” IEEE Transactions on Medical Robotics and Bionics, vol. 3, no. 1, pp. 166–178, 2021. doi:10.1109/tmrb.2020.3044115
[14]. N. Tacca, J. Nassour, and G. Cheng, “Model predictive control of a soft elbow exosuit reduces interaction torque,” 2023 11th International IEEE/EMBS Conference on Neural Engineering (NER), 2023. doi:10.1109/ner52421.2023.10123906
[15]. L. Sy et al., “M-sam: Miniature and soft artificial muscle-driven wearable robotic fabric exosuit for upper limb augmentation,” 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), 2021. doi:10.1109/robosoft51838.2021.9479333
[16]. S. J. Park, K. Choi, H. Rodrigue, and C. H. Park, “Soft exosuit based on fabric muscle for upper limb assistance,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 1, pp. 26–37, 2023. doi:10.1109/tmech.2022.3194975
[17]. F. Cleary, W. Srisa-an, D. C. Henshall, and S. Balasubramaniam, “Dynamic field-programmable logic-driven soft exosuit,” IEEE Sensors Journal, vol. 23, no. 10, pp. 10935–10949, 2023. doi:10.1109/jsen.2023.3265514
[18]. C. Ott, R. Mukherjee, and Y. Nakamura, “Unified impedance and admittance control,” 2010 IEEE International Conference on Robotics and Automation, 2010.
[19]. J. L. Samper-Escudero, A. F. Contreras-González, M. Ferre, M. A. Sánchez-Urán, and D. Pont-Esteban, “Efficient multiaxial shoulder-motion tracking based on flexible resistive sensors applied to exosuits,” Soft Robotics, vol. 7, no. 3, pp. 370–385, 2020. doi:10.1089/soro.2019.0040
[20]. A. Ghosh, K. Nath, M. K. Bera, and S. H. Laskar, “Design of Adaptive Gravity Compensation Controller for upper limb exosuit: The concurrent learning-based approach,” 2022 Eighth Indian Control Conference (ICC), 2022. doi:10.1109/icc56513.2022.10093439
Cite this article
Guo,Z. (2023). A review of upper-limb soft exosuit. Theoretical and Natural Science,13,51-58.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Computing Innovation and Applied Physics
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. M. Mihelj, T. Nef, and R. Riener, “A novel paradigm for patient-cooperative control of upper-limb rehabilitation robots,” Advanced Robotics, vol. 21, no. 8, pp. 843–867, 2007. doi:10.1163/156855307780851975
[2]. R. Morales, F. J. Badesa, N. García-Aracil, J. M. Sabater, and C. Pérez-Vidal, “Pneumatic robotic systems for Upper Limb Rehabilitation,” Medical & Biological Engineering & Computing, vol. 49, no. 10, pp. 1145–1156, 2011. doi:10.1007/s11517-011-0814-3
[3]. K. Yonezawa et al., “Extension force control considering contact with an object using a wearable robot for an upper limb,” 2013 IEEE International Conference on Systems, Man, and Cybernetics, 2013. doi:10.1109/smc.2013.606
[4]. V. Klamroth-Marganska, J. Blanco, K. Campen, A. Curt, V. Dietz, T. Ettlin, M. Felder, B. Fellinghauer, M. Guidali, and A. Kollmar, ‘‘Three dimensional, task-specific robot therapy of the arm after stroke: A multicentre, parallel-group randomised trial,’’ Lancet Neurol., vol. 13, no. 2, pp. 159–166, 2014.
[5]. A. T. Asbeck, R. J. Dyer, A. F. Larusson, and C. J. Walsh, “Biologically-inspired soft exosuit,” in IEEE International Conference on Rehabilitation Robotics, Seattle, WA, 2013.
[6]. T. Proietti, E. Ambrosini, A. Pedrocchi, and S. Micera, “Wearable robotics for impaired upper-limb assistance and rehabilitation: State of the art and future perspectives,” IEEE Access, vol. 10, pp. 106117–106134, 2022. doi:10.1109/access.2022.3210514
[7]. E. Galofaro, E. D’Antonio, N. Lotti, and L. Masia, “A hybrid assistive paradigm based on neuromuscular electrical stimulation and force control for upper limb exosuits,” 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), 2022. doi:10.1109/biorob52689.2022.9925466
[8]. D. Burchielli et al., “Adaptive hybrid fes-force controller for Arm Exosuit,” 2022 International Conference on Rehabilitation Robotics (ICORR), 2022. doi:10.1109/icorr55369.2022. 9896493
[9]. J. L. Samper-Escudero, S. Coloma, M. A. Olivares-Mendez, M. A. Gonzalez, and M. Ferre, “A compact and portable exoskeleton for shoulder and elbow assistance for workers and prospective use in space,” IEEE Transactions on Human-Machine Systems, pp. 1–10, 2022. doi:10.1109/thms.2022.3186874
[10]. F. Missiroli et al., “Rigid, soft, passive, and active: A hybrid occupational exoskeleton for bimanual multijoint assistance,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2557–2564, 2022. doi:10.1109/lra.2022.3142447
[11]. N. Lotti, E. Tricomi, F. Missiroli, X. Zhang, and L. Masia, “Machine learning techniques in soft robotic suits for whole Body Assistance,” 2022 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), 2022. doi:10.1109/dasc/picom/cbdcom/cy55231.2022.9927957
[12]. N. Lotti, E. Tricomi, F. Missiroli, X. Zhang, and L. Masia, “Machine learning techniques in soft robotic suits for whole Body Assistance,” 2022 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress (DASC/PiCom/CBDCom/CyberSciTech), 2022. doi:10.1109/dasc/picom/cbdcom/cy55231.2022.9927957
[13]. R. F. Natividad, T. Miller-Jackson, and R. Y. Chen-Hua, “A 2-DOF shoulder exosuit driven by modular, pneumatic, fabric actuators,” IEEE Transactions on Medical Robotics and Bionics, vol. 3, no. 1, pp. 166–178, 2021. doi:10.1109/tmrb.2020.3044115
[14]. N. Tacca, J. Nassour, and G. Cheng, “Model predictive control of a soft elbow exosuit reduces interaction torque,” 2023 11th International IEEE/EMBS Conference on Neural Engineering (NER), 2023. doi:10.1109/ner52421.2023.10123906
[15]. L. Sy et al., “M-sam: Miniature and soft artificial muscle-driven wearable robotic fabric exosuit for upper limb augmentation,” 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), 2021. doi:10.1109/robosoft51838.2021.9479333
[16]. S. J. Park, K. Choi, H. Rodrigue, and C. H. Park, “Soft exosuit based on fabric muscle for upper limb assistance,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 1, pp. 26–37, 2023. doi:10.1109/tmech.2022.3194975
[17]. F. Cleary, W. Srisa-an, D. C. Henshall, and S. Balasubramaniam, “Dynamic field-programmable logic-driven soft exosuit,” IEEE Sensors Journal, vol. 23, no. 10, pp. 10935–10949, 2023. doi:10.1109/jsen.2023.3265514
[18]. C. Ott, R. Mukherjee, and Y. Nakamura, “Unified impedance and admittance control,” 2010 IEEE International Conference on Robotics and Automation, 2010.
[19]. J. L. Samper-Escudero, A. F. Contreras-González, M. Ferre, M. A. Sánchez-Urán, and D. Pont-Esteban, “Efficient multiaxial shoulder-motion tracking based on flexible resistive sensors applied to exosuits,” Soft Robotics, vol. 7, no. 3, pp. 370–385, 2020. doi:10.1089/soro.2019.0040
[20]. A. Ghosh, K. Nath, M. K. Bera, and S. H. Laskar, “Design of Adaptive Gravity Compensation Controller for upper limb exosuit: The concurrent learning-based approach,” 2022 Eighth Indian Control Conference (ICC), 2022. doi:10.1109/icc56513.2022.10093439