






1. Introduction
With the rapid development of science and technology, the concept of meta-universe is receiving more and more attention worldwide. Meta-universe is a world in which the virtual and the real are intertwined and develop together, which provides a new platform for people’s social, economic and cultural activities, and is also expected to lead the future development trend of science and technology. The core of the meta-universe concept lies in the virtual and real interaction. In this world, virtual and reality are no longer mutually independent domains, but are integrated and influenced by each other. People can perceive and experience the virtual world more realistically through virtual reality technology, and at the same time they can access and utilise virtual resources in the real world [1]. In this emerging meta-universe, the concept of human-computer interaction is given a whole new meaning. With the development of science and technology, people are no longer satisfied with the simple input-output mode, but pursue a more natural and intuitive human-computer interaction. To achieve this goal, augmented reality and virtual reality technologies have been widely explored and applied, and these two technologies achieve human-computer interaction through immersive digital experiences, interactive environments, simulation and participation [2]. Haptic feedback devices play a crucial role in achieving human-computer interaction. Among them, vibrotactile is the most common form, which simulates tactile perception by adjusting the vibration frequency, duration and intensity, and can very effectively stimulate the human tactile system to achieve the desired organ response. Future research directions can include further improving the performance and accuracy of the device, exploring more application areas, optimising user experience and personalised settings, and other directions for continuous research and innovation [3].
First, this paper introduces the principle of vibrotactile feedback, which simulates tactile perception by adjusting the vibration frequency, duration and intensity. In terms of the design and implementation of vibrotactile feedback devices, this paper discusses the development of vibration-based haptic feedback wearable devices from three aspects: material, design and implementation. In terms of materials, this paper analyses in detail the materials and material impact effects of existing vibrotactile feedback wearable devices. In terms of design, a new design concept with high comfort and high reliability is proposed for vibration feedback wearable devices. In terms of implementation, this paper presents solutions to the shortcomings of vibrotactile feedback wearables. Finally, this paper investigates the application of vibrotactile feedback devices in robot control, rehabilitation and medical treatment, and discusses its future development direction and application prospect.
2. Principle of vibration-based haptic feedback
Tactile sensation occurs when mechanical contact, such as friction or pressure, stimulates the skin surface. The pressure or traction generated by the mechanical contact can act on the tactile receptors distributed on the body surface, and the tactile signals generated by the tactile receptors can be transmitted to the cerebral cortex through neurons to produce tactile perception. Tactile stimulation can come from different external stimuli, such as vibrotactile, electrotactile, pneumotactile, etc. Among them, vibrotactile feedback is the most common, by changing the frequency, amplitude, time, and other changes in vibration features to excite the human tactile system, after which different tactile sensations can be simulated. Many wearable vibrotactile feedback devices have been developed. These feedback devices use microcontrollers to control the intensity, frequency and other vibration characteristics of specific vibration generators (e.g., electromagnetic vibrators or piezoelectric vibrators) and transfer them to human skin, and then stimulate the skin through the resulting vibration to realize tactile feedback [3]. Afterward, the three major reference quantities of vibration intensity, spatial landing point and duration can be integrated to customize the optimal vibrotactile coding scheme, and then through a series of tailor-made physiological and psychological experiments, a set of vibrotactile signal coding can be formulated to match the target attributes, and be applied to a wide range of fusion information expression for human-computer interaction [4].
3. Research work
Since wearable vibrotactile feedback devices can be easily worn on different parts of the body, such as the hands, wrists, and head, users can use them anytime, anywhere. And it is of great significance in improving the interaction experience, conveying information and status, etc. Therefore, continuously improving the performance of wearable vibrotactile feedback systems in all aspects has always been the research direction.
The combination of vibrotactile feedback and gloves is used in a wide variety of real-world applications. In virtual touch, the glove has inbuilt bending sensors to capture hand movements and provide joint information to the user. In addition, a small vibration motor is embedded inside the glove for transmitting haptic sensations to the user. A Linux®-based ROS environment and a Windows® application with the VTK library as the rendering engine are used on the software side. These two applications display the virtual glove on the computer and follow the real-world hand movements, mapping them to the virtual reality environment. In addition, a collision detection mechanism has been introduced to establish a connection with virtual world objects [5].With the above concept, we can construct a physically based virtual hand for interacting with virtual objects, as shown in Figure 1. A virtual spring damping mechanism can connect the associated parts between the user’s physical and virtual hands. In order to improve the accuracy of real-time co-localisation between the physical hand and the virtual hand, we can introduce an error summation term in the virtual coupling to achieve this goal. In addition, the fingers are equipped with vibration actuators, thus replicating the haptic perception humans obtain when interacting with objects by hand in the real world. At the same time, the virtual hand employs improved complementary vibrotactile effects in order to give objects a sense of mass [6].
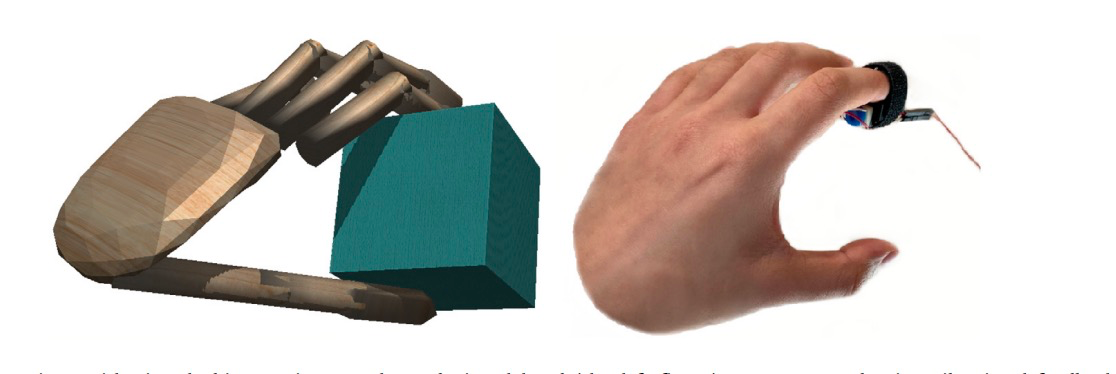
Figure 1. The structure of the virtual hand [6].Vibratory feedback is used for physically-based interaction with virtual objects using a co-located virtual hand (the left figure) by means of acceleration proportional to the mass of the object (the right figure).
Regarding the material of wearable devices, to wear them on the hand more accurately to observe the movements of the hand, a team of researchers has designed and launched a smart glove made using 3D printing technology, as shown in Figure 2. By analyzing several typical sensors commonly found in existing wearable devices, it was found that most smart gloves appearing on the market today have some shortcomings. Since capacitive and piezoresistive sensors require a driving voltage for proper operation, this smart glove eschews traditional materials and instead uses optimized MXene/Ecoflex nanocomposites to fabricate toroidal friction electric nanogenerators. This improvement largely improves the self-powered sensor’s charge density, friction electric output performance, and flexibility. In addition, the glove is designed with a pyramid array, and thanks to its superb compression capacity, outstanding abrasion resistance, and high dexterity during finger movement, the developed sensor exhibits excellent overall performance. In addition, the 3D-printed ring structure is not limited by the spatial requirements of traditional friction electric sensors, and can maintain the positive and negative charge spatial state between the finger skin and the material layer very efficiently without any spacer structure, thus enabling it to work in a contact separation mode. At the same time, the smart glove adopts a stretchable structure design, which enables the sensor to be stretched in different directions, thus expanding its scope of application. In addition, the smart glove is made of TPU material with a certain degree of elasticity and strength, which ensures that the sensor will not generate excessive vibration in the actual use process, thus providing a safer protection for the human body [7].
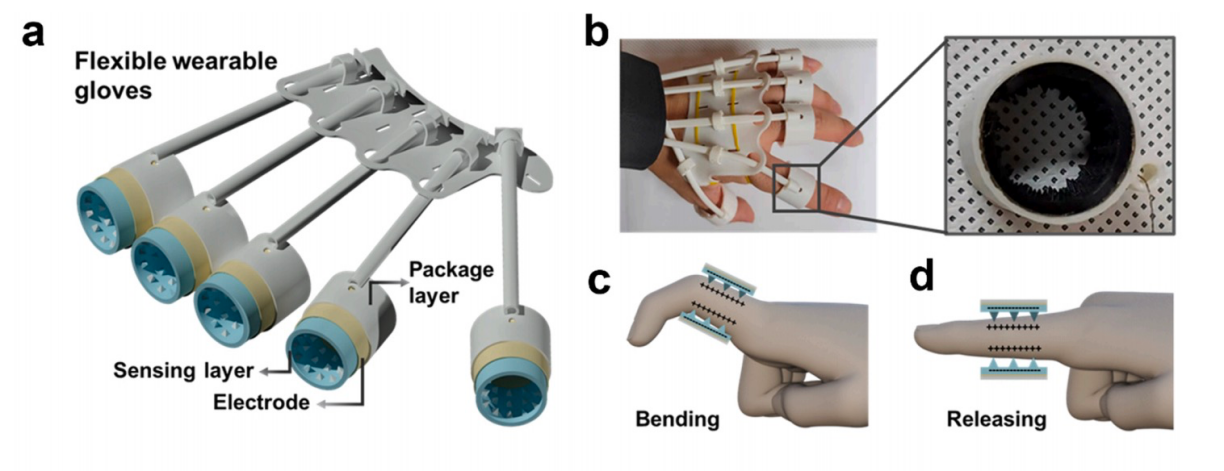
Figure 2. The structure of the wearable glove [7].(a) 3D printed flexible wearable glove assembled using STTS. (b) 3D printed flexible wearable glove (inset shows a single sensor). (c) Finger bend (d) Finger release.
Conventional force haptic feedback devices are mostly single-point interactions and desktop fixed devices. However, with the booming development of virtual interaction, wearable devices have been generally valued for their portability, comfort, etc. In order to enrich the content of interaction perception in wearable haptic feedback devices, researchers propose a dual-channel force haptic feedback device. The shape of this device adopts wearable exoskeleton design, and the communication is realized through Bluetooth technology, which can reduce interference when the hand moves. On the one hand, the motor starts to rotate when the device receives the command from Bluetooth. It generates traction through the wire rope to pull out the finger cuff on the fingertip, so that the finger cuff forms pressure on the fingertip to achieve a linear expression of force; on the other hand, it caters to the requirements of wearable devices because of the piezoelectric ceramic vibrator’s low noise, short response time, low power consumption, wide driving bandwidth, and a more lifelike vibration experience. It is used to provide the The piezoelectric ceramic undergoes deformation when loaded with a voltage, and the rapid deformation change causes physical vibration to provide a vibrotactile stimulus. This dual-channel vibration feedback device can better solve the single problem of human-computer interaction perception, and significantly improve the user’s virtual reality realism and immersion [8].
Universally, wearable devices that produce haptic perception through a single vibratory stimulus often result in decreased sensitivity after prolonged use. In addition, researchers have found that the perception of tactile sensation strongly depends on the stimulation frequency to which the skin is exposed. As a result, there has been a shift towards exploring methods of generating tactile perception through skin stretching in combination with vibratory stimulation, with a view to better applying it to human-computer haptic interactions. In this research project, the researchers developed a method for generating high-intensity haptic stimuli by utilising circulatory lateral skin stretching matched to skin resonance. By quantifying the resonance frequencies of the skin at different sites, the corresponding skin responses were then explored in terms of three different perceptual stimuli (i.e., skin resonance frequency, above and below the skin resonance frequency).These three perceptual stimuli are low-frequency stimulation, resonant frequency stimulation and high-frequency stimulation. It was found that low-frequency stimulation gave the sensation of different shocks, while resonant frequency stimulation gave the sensation of periodic skin stretching, and as for high-frequency stimulation, it gave the sensation similar to standard vibration [9]. This new approach shows that wearable resonant skin stretching has a broad application prospect in the haptic feedback field and provides a brand new idea for haptic feedback system. This research provides theoretical support for developing more advanced haptic sensing devices and finding new ways to improve realism and user immersion in human-computer interaction.
With the gradual improvement of the vibrotactile feedback system, in order to better realise the information interaction between the vibrator and the skin, the researchers have developed a force haptic feedback device, which can effectively regulate the direct contact between the vibrator and the skin, and can well solve the problem that the contact between the current vibrotactile sensor and the skin is not adjustable. An airbag is built into the sensor, and the contact force between the vibrator and the skin can be adjusted by changing the air pressure inside the airbag. Feedback is then provided through the air pressure sensor, and pulse width modulation is used to give different voltages to the vibrator to achieve different vibration intensities [10]. This approach can perfect the authenticity of the tactile signals fed back from the vibrotactile receptors.
4. Applications in Virtual Reality
The use of vibrotactile feedback in virtual reality (VR) is known as an augmented reality (AR) technology. In VR environments, different haptic sensations such as vibration, collision and touch are simulated to enable users to better perceive objects and events in the virtual environment. Combined with sound and visual feedback, this can enhance the user’s immersion and interactive experience of the virtual environment.
Wearable vibrotactile feedback sensors have been widely used in the gaming field, and by applying this technology to the virtual medical field, doctors and patients can provide a more in-depth and detailed interactive experience and health monitoring. A gesture-controlled game based on rhythm games is developed into a virtual reality-based hand rehabilitation system, which can provide personalised hand rehabilitation training through wearable vibrotactile feedback devices. This rehabilitation system helps patients exercise their hand motor functions and improve hand dexterity, enhances the timing and coordination of movements, and promotes motor learning. Meanwhile, measuring healthy subjects’ and stroke survivors’ brain activation status through functional near infrared spectroscopy (fNIRS) can provide doctors with a more accurate brain function assessment and develop a more scientific and effective rehabilitation programme for patients, as shown in figure 3 [11]. It can be seen that the application of wearable vibrotactile feedback sensors in the field of virtual healthcare can provide doctors with more realistic and accurate tactile sensory information, helping them better to understand the patient’s condition and physical state.
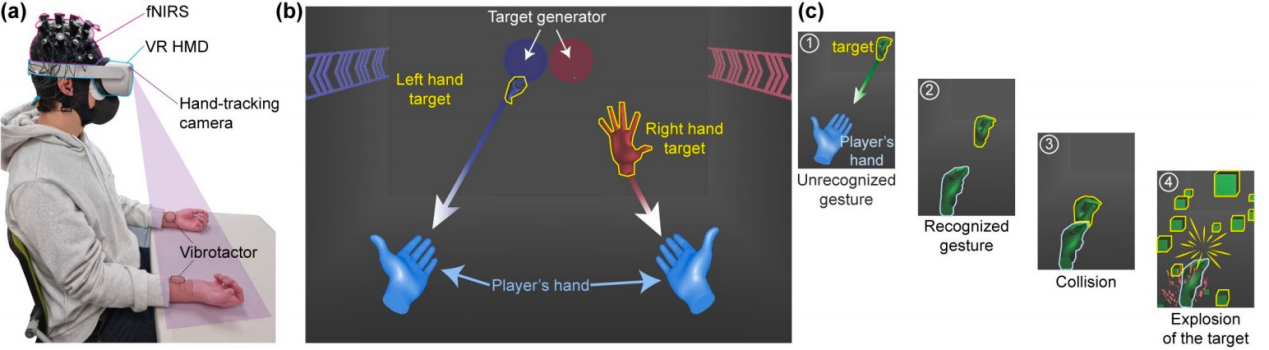
Figure 3. The Hand rehabilitation system [11]. (a) System settings. (b) The VR environment that the player sees when playing a VR game. (c) Fingertip contact with the destination symbol.
With the continuous development of human-computer interaction technology, haptic feedback technology has gradually become one of the research hotspots, and has been widely used in the field of virtual reality. Although most of the applications of haptic feedback technology still stay at the level of knowledge observation, when the learners gradually lose interest in the traditional teaching mode, its problems also slowly appear. For example, the interaction between learners and knowledge is weak, and the field experience is not good. Therefore, the combination of virtual reality and haptic feedback technology has been widely used in the field of education. For example, in physics teaching, haptic feedback technology can simulate the law of force and reaction force, and in medical education, haptic feedback technology can be used to simulate the mastery of the strength in suture surgery, etc. When haptic feedback technology is combined with virtual reality, the dynamic changes of the virtual model can be transmitted to the learner through the form of force, so that the learner can feel the interaction effect between the objects, thus generating the perceptual experience of contacting the real object [12].
Vibrotactile feedback devices can be integrated with virtual environments to enable better robot teleoperation. Typically, remote control of robotic systems relies heavily on steady visual feedback from the operator, which undoubtedly increases the operator’s cognitive load. To improve this situation, users can achieve a higher quality of temporal and spatial robot collaboration through diversified haptic feedback. Therefore, researchers have developed a wearable haptic interface called vDeltaGlove. This interface provides diversified haptic feedback in controlling the virtual environment to manipulate the robotic arm. This diversified haptic feedback can convey real-time information about the movement status and strength of the robotic arm, thus allowing the operator to control the robot through direct haptic perception. This enables a new model of human-robot interaction, providing users with an intuitive and immersive robot control experience that enables better performance in a variety of applications [13].
5. Conclusion
Overall, in this paper, in the process of comprehensive research on vibration feedback device, it have deeply explored many aspects such as material selection, design concept, realisation method and application scenarios. The most suitable material for making the vibration feedback device was selected and studied in detail through the comparative analysis of the materials. In terms of design concept, user needs and product characteristics are fully considered, and we strive to design a vibration feedback device that is ergonomic and easy to operate. In terms of realisation methods, different advanced vibration feedback technologies were studied and discussed. The results of the study show that the vibration feedback device can effectively enhance the user experience and product interactivity. By giving users intuitive tactile feedback, vibration feedback devices can help users better understand and operate the product, improving product ease of use and user satisfaction. At the same time, vibration feedback devices also have a wide range of application value, can be used in medical, education and other fields. In addition, vibration feedback devices also have great application potential and research value in virtual reality, augmented reality, remote operation, robot control and rehabilitation medicine. Despite the progress made in designing and implementing vibration feedback devices, some challenges and problems still need to be solved. For example, how to determine the appropriate vibration feedback mode and intensity and ensure the stability and reliability of vibration feedback. These issues require further research and exploration. Future research directions could include further improving device performance and accuracy, exploring more application areas, optimising user experience and realising personalised settings. Through continuous research and innovation, we believe that vibration feedback devices will play a more important role in the future, bringing more convenience and comfort to human life and work.
References
[1]. Said G R E 2023 Electronics 12 1379
[2]. Al-Ansi A M, Jaboob M, Garad A and Al-Ansi A .2023 SSHO 8 100532.
[3]. Hong Z Y, Zhou K H, Sui J F and Ji L H 2015 Space Medicine & Medical Engineering 28 5
[4]. Hao F 2014 Southeast University
[5]. Díaz Tribaldos M R, Escobar ocampo J M and Vivas Albán S A 2015 Revista EIA 23 29
[6]. Khosravi H, Etemad K and Samavati F F. 2022 Computers & Graphics 102 120
[7]. Zhang S P, Rana S S, Bhatta T, Pradhan G B, Sharma S, Song H, Jeong S and Park J Y 2023 Nano Energy 106 108110
[8]. Mo Y T, Song A G, Qin H H and Yu Y Q.2018 Chinese Journal of Scientific Instrument 39 188
[9]. Shull P B, Tan T, Culbertson H M, Zhu X Y and Okamura A M 2019 IEEE T HAPTICS 12 247
[10]. Yan Y C, Wu C C, Cao Q Q, Yang D H, Fei F and. Song A G 2020 Measurement & Control Technology 39 36
[11]. Bae S and Park H S 2023 IEEE T NEUR SYS REH 31 3732
[12]. Qu X S, Sun Y L, Shen Y, and Pan J J. 2021 .Journal of Distance Education 039 24
[13]. Trinitatova D and Tsetserukou D 2023 IEEE T HAPTICS
Cite this article
Hong,S. (2023). Vibration-based wearable haptic feedback device and its applications. Theoretical and Natural Science,17,104-109.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Modern Medicine and Global Health
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Said G R E 2023 Electronics 12 1379
[2]. Al-Ansi A M, Jaboob M, Garad A and Al-Ansi A .2023 SSHO 8 100532.
[3]. Hong Z Y, Zhou K H, Sui J F and Ji L H 2015 Space Medicine & Medical Engineering 28 5
[4]. Hao F 2014 Southeast University
[5]. Díaz Tribaldos M R, Escobar ocampo J M and Vivas Albán S A 2015 Revista EIA 23 29
[6]. Khosravi H, Etemad K and Samavati F F. 2022 Computers & Graphics 102 120
[7]. Zhang S P, Rana S S, Bhatta T, Pradhan G B, Sharma S, Song H, Jeong S and Park J Y 2023 Nano Energy 106 108110
[8]. Mo Y T, Song A G, Qin H H and Yu Y Q.2018 Chinese Journal of Scientific Instrument 39 188
[9]. Shull P B, Tan T, Culbertson H M, Zhu X Y and Okamura A M 2019 IEEE T HAPTICS 12 247
[10]. Yan Y C, Wu C C, Cao Q Q, Yang D H, Fei F and. Song A G 2020 Measurement & Control Technology 39 36
[11]. Bae S and Park H S 2023 IEEE T NEUR SYS REH 31 3732
[12]. Qu X S, Sun Y L, Shen Y, and Pan J J. 2021 .Journal of Distance Education 039 24
[13]. Trinitatova D and Tsetserukou D 2023 IEEE T HAPTICS