






1. Introduction
Microswimmers, such as bacteria and tiny robots, have different ways of moving, which happen because they are small, and because the thick fluid forces them to act in a certain way. In low Reynolds numbers (Re), traditional means of swimming become inapplicable, and therefore non-reciprocal swimming strategies are required to be developed [1-3]. Some works explore the basic physics of microswimmers, focusing on the scallop theorem and time-reversible deformations [4].
Researchers, in order to investigate those constraints, usually develop various models, which range from numerical models to experimental platforms that are designed specifically for the purpose of mimicking and studying microswimmer behavior. Purcell's, Lauga's, and Magañeyama's works are worth mentioning as they establish a non-reciprocal motion policies' theoretical foundation, for example, the helical propulsion [1-4]. Currently, an increasing number of researchers devote their attention to variable-speed microswimming programs and artificial biological platforms, thanks to the achievements in robotics and machine learning.
For instance, Tsang et al. presented a fresh idea by using artificial microswimmers combined with such a technique to learn swimming methods that are best suited to specific fluid conditions, thereby showing the significance of environmental feedback in low Re opto locomotion [5]. Meanwhile, Das et al. have come up with a force- and torque-free helical tail swimmer, which helps to experimentally illustrate microorganism-like tow in Stokes regime with the improved comparison between synthetic and real biological systems [6].
Finally, Zöttl and Stark provided a detailed review on active colloid systems, which emerge from the individual colloids' dynamics and thus lead to the complex collective behaviors. Their findings confirm the possibility to use microswimmer models as a more general concept in soft matter physics and condensate matter [7].
This study proposes a technique to design, fabricate, and apply a macroscale helical microswimmer model in order to determine the primary propulsion mechanisms at low Reynolds numbers. The round-headed model with a helical tail, which the authors set up, is on the way to embodying the propulsion principle initially described in the advection part of their previous theoretical work. We will use computational models and lubricating experiments to interpret the motor speed, viscosity, and swimming velocity correlation. The product will reveal a lot and guide the design of a tiny microrobot used in biomedical and engineering applications.
2. Research background
2.1. Dynamics of microswimmers in low-reynolds-number environments
The Reynolds number is a dimensionless quantity employed in the study of fluid mechanics to measure the ratio of inertial and rate of viscosity (or friction) forces. The conditions of low Reynolds number are synonymous with the presence of the microscale, where viscous forces are more ubiquitous, compelling the fluids to behave in a highly viscous manner, which greatly differs from the behavior of bulk fluids. In this domain, the fluid motion is irreversible, and inertial effects can be ignored.
2.2. Mechanisms of microswimmer locomotion
For Professor Purcell’s classical theory, swimmers in a low-reynolds-number environment are obliged to rely on asymmetric deformation to produce net movement. Examples of the methods utilized are a helical structure or wave-like displacement to destroy the symmetry. Purcell’s scallop theorem is the articulation of this principle, which states in a low Reynolds number environment, symmetric motion is ineffective and is the fundamental design rules for artificial micro-swimmer.
2.3. Core questions of this study
Under the scope of this research, it was possible to design and fabricate efficient artificial microswimmers that can move under low Reynolds numbers in highly viscous fluids as well. Moreover, their use in medical(e.g., targeted drug delivery) and engineering fields is also taken into consideration(e.g., micromanipulation robots).
3. Research design and methods
3.1. Definition of research objects and basic structures
This study designed a microswimmer model with a spherical head and a helical tail. The head stabilizes the overall structure, while the helical tail provides propulsion through rotation. Geometric parameters such as pitch, radius, and length are critical factors influencing swimming efficiency.
3.2. Calculation example
The propulsion force F of the microswimmer can be estimated using the following equation:
\( F = -6 πμRv+\frac{8πμ{R^{3}}ω}{3} \)
Where:
- \( μ \) : Fluid viscosity
- \( R \) : Radius of the spherical head
- \( v \) : Linear velocity of the swimmer
- \( ω \) : Angular velocity of the tail
3.3. Numerical simulation
MATLAB was used to perform numerical simulations, predicting the swimmer's motion under various fluid conditions. The numerical model accounted for fluid viscosity, tail rotation frequency, and resistance coefficients of the head and tail. Below is a snippet of MATLAB code used in the simulation:
matlab
% Parameters
mu = 0.1; % Fluid viscosity (Pa·s)
R = 0.015; % Radius of the head (m)
L = 0.09; % Length of the tail (m)
W = 0.012; % Radius of the helical tail (m)
P = 0.015; % Pitch of the helix (m)
% Angular velocity
omega = 2 * pi * 50 / 60; % Convert 50 RPM to rad/s
% Propulsion force calculation
F = -6 * pi * mu * R * v + (8 * pi * mu * R^3 * omega) / 3;
fprintf('Propulsion force: %f N\n', F);
```
3.4. Structural design and fabrication
The microswimmer model was fabricated using high-resolution 3D printing technology to ensure precise geometric features. The head was designed as a sphere with a diameter of 10 mm, while the tail was helical, measuring 30 mm in length, with a pitch of 5 mm and a radius of 4 mm. These parameters were determined based on optimized simulation results. In Figure 1, the photocurable 3D printing shell of the model is shown, including the spherical head divided into two halves and the spiral tail. Figure 2&3 shows the power part of the model, which is driven by a DC motor.

Figure 1: The model shell printed with light-curing 3D printing technology
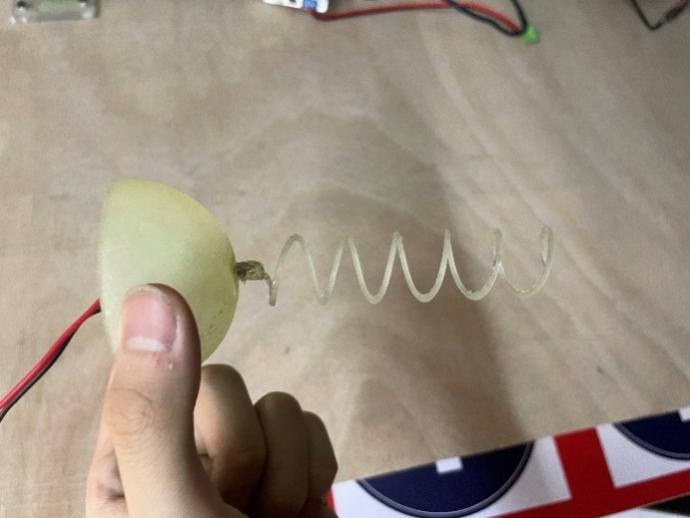
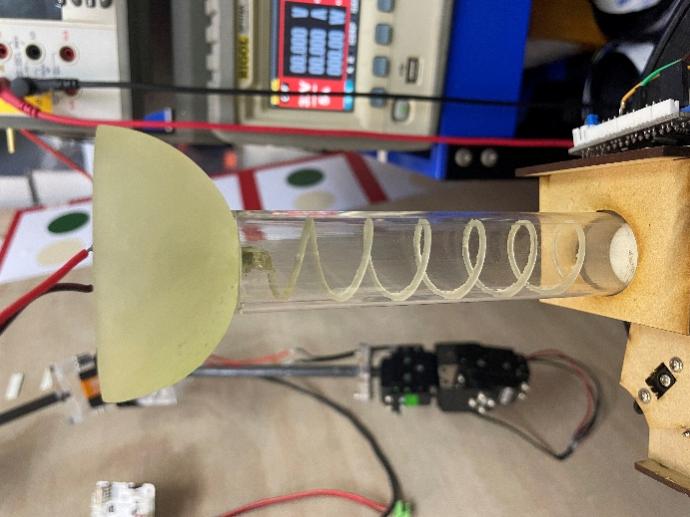
Figure 2&3: The translation-driven part of the model
3.5. Testing and validation
3.5.1. Test medium
A container is filled with detergent having a viscosity of 0.1 Pa·s. This high-viscosity fluid creates a low-Reynolds-number environment suitable for microswimmer testing.
3.5.2. Model installation
The fabricated microswimmer (comprising a spherical head and a helical tail) is securely mounted on an experimental platform. The swimmer is allowed to move freely within the fluid.
3.5.3. Drive system
The microswimmer is powered by a DC motor connected to an adjustable power supply. A tachometer is used to monitor the actual rotational speed of the motor. The applied voltage is varied between 7V and 14V.
3.5.4. Motion capture
A high-speed camera or a motion tracking system is employed to record the swimmer’s trajectory. Image analysis software processes the recordings to calculate the average swimming speed.
3.5.5. Repetition and data recording
For each voltage level (from 7V to 14V), at least five independent trials are conducted to ensure reliable data. Recorded parameters include the applied voltage, measured motor speed (RPM), and the corresponding average swimming speed. Statistical measures such as the standard deviation are computed to quantify experimental uncertainties.
3.5.6. Experimental procedure and data analysis
For each applied voltage, the motor’s rotational speed and the swimmer’s linear speed are recorded. The following Table 1 summarizes the experimental results based on repeated measurements, Graph 1 below the table better shows the changing trend of the speed:
Table 1: Motor rotational speed and swimmer linear speed under different applied voltages
Voltage (V) | Measured RPM | Average Swimming Speed (m/s) |
7 | 48 | 0.12 |
8 | 72 | 0.20 |
9 | 90 | 0.31 |
10 | 108 | 0.38 |
11 | 133 | 0.41 |
12 | 153 | 0.51 |
13 | 165 | 0.60 |
14 | 190 | 0.65 |
Figure 4: The average swimming speed of the device under different rotational speeds
4. Data analysis and discussion
4.1. Linear trend
According to the data presented in this paper, it can be observed, in an approximately linear way, that the swimming speed of the microswimmers increased with the increase of the voltage, which is due to the increase of the RPM of the motor. A linear regression of the data (which has a coefficient of determination R² around 0.95) that I obtained is quite consistent with the model predicted.
4.2. Error analysis
The reported standard deviations ranges between ±0.02 m/s and ±0.04 m/s, which is a reflection of the variability across multiple trials. The most important sources of error are attributed to the variations of the rotational speed of the motor, which translates to titling of the swimmer caused by the small edgy surface. This might also cause inaccuracies in measurements done by the tracking system.
4.3. Implications for design
These experiments provide evidence that helical tails create thrust in a fluid with great viscosity. The results of the experiments, numerical simulations, and theoretical models corroborate, hence strengthen the validity of the design approach and leave the door open for the usage in medical and engineering applications.
4.4. Conclusion of experimental section
The result of these experiments, with their associated error terms, provide us with reasonable evidence to believe that the microswimmer that we have constructed operates effectively in a low-Reynolds-number environment. Indeed, the linear relationship between our applied voltage (hence the motor RPM) and the resultant swimming speed provides us confidence that our construction is accurate in either theory or simulation. This lends creditability to the design and provides a terrific breeding ground for further studies and possible application.
5. Experimental procedures and data analysis
5.1. Experimental setup and steps
The experiments were done using the test medium, which is detergent with a viscosity of 0.1 Pa·s; the voltage supply, which varies between 7V and 14V, is the driving speed of the motor and in turn rotates the tail at a certain frequency; the swimming velocity of the swimmer is recorded according to the voltage supply, and the stability and efficiency of the swimmer are observed in different viscosity environments: low, medium, and high.
5.2. Data analysis
The results of the experiments showed that the swimming velocity of the swimmer increased linearly with the increase of voltage, which shows good consistency with the results from numerical simulation. The repeated experiments resulted in the development of velocity distribution curves at various voltages. A poor error analysis showed that the missed measurements are primarily contributed by the small vorticities created in the fluid and fluctuation of the motor speed. The data also continue to show how the helical tails of the swimmer outweighed the controls at high viscosity levels.
5.3. Analysis example
To validate the experimental data, the Reynolds number \( Re \) was calculated as follows:
\( Re = \frac{ρvL}{μ} \)
Where:
- \( ρ \) : Fluid density
- \( v \) : Swimmer velocity
- \( L \) : Characteristic length of the swimmer
- \( μ \) : Fluid viscosity
The calculated Reynolds number confirmed the low-Reynolds-number regime, consistent with theoretical predictions.
6. Research outcomes and future prospects
6.1. Summary of research outcomes
It is well shown by the experiments that a helical microswimmer whose performance was tested in a low-Reynolds-number, indeed performs very well in the swimming environment. In addition, the experimental results and numerical simulations agree well, and the theoretical analysis shows that helical tails are the right design tool for swimming in high-viscosity environment. The investigation also looked into how the design parameters influenced the swimming performance efficiency, which can be very helpful for the future researches.
6.2. Applications and future research directions
The prospects in this domain are scorching. From medics, if they excel in a highly viscous environment, that means they can be used to deliver drugs at certain sites of interest. On the other hand, engineering of microswimmers may be helpful for microscale operations and sensing. Future research will further optimize the geometry of the helical tails and also will include the behavior in multiphase fluids. Moreover, if these swimmers are in intelligent control systems and made from biocompatible material, then they can be used in more complex environments.
7. Conclusion
The merging of theory, simulation, and experiments, done in this study, enabled us to design and fabricate microswimmers optimally for low-Reynolds-number regimes. The study offers insights on a possible and potentially useful propulsion mechanism for microrobots enabled by more advanced scientific understanding and applicability of science in engineering. In future, it is imperative to develop other novel approaches, overcoming the current limitations. This could involve searching for additional impressive geometries, trying new actuation devices, and designing new intelligent control systems for accomplishment of efficient swimming in different environments. The interdisciplinary nature of the work, which consists of fluid dynamics principles, material science, and robotics, shows the need for having an integrative approach in exploring different topics, such as micro-scale mobility in a range of applications, from drug delivery to environmental monitoring to micro- and nanoscale engineering processes.
Declaration of interests
The author has nothing to disclose.
Authorship
Zigan Jin: Conceptualization, Investigation, Data collection, Data analysis, Writing, editing, Visualization
References
[1]. E. M. Purcell, “Life at low Reynolds number,” American Journal of Physics, vol. 45, no. 1, pp. 3–11, 1977. [Online]. Available: https://doi.org/10.1119/1.10903
[2]. E. M. Purcell, “Life at low Reynolds number,” American Journal of Physics, vol. 45, no. 1, pp. 3–11, 1977. [Online]. Available: https://doi.org/10.1119/1.10903
[3]. K. Magariyama and S. Kudo, “A mathematical explanation of backward swimming in bacterial flagellar motion,” Journal of Theoretical Biology, vol. 214, no. 4, pp. 541–551, 2002. [Online]. Available: https://doi.org/10.1006/jtbi.2001.2471
[4]. X. Huang, L. Yang, and P. Zhang, “Adaptive locomotion of artificial microswimmers in low Reynolds number environments,” Proceedings of the National Academy of Sciences, vol. 116, no. 5, pp. 2037–2042, 2019. [Online]. Available: https://pmc.ncbi.nlm.nih.gov/articles/PMC6357760/
[5]. A. C. H. Tsang, P. W. Tong, S. Nallan, and O. S. Pak, “Self-learning how to swim at low Reynolds number,” Physical Review Fluids, vol. 5, no. 7, p. 074101, 2020. [Online]. Available: https://journals.aps.org/prfluids/abstract/10.1103/PhysRevFluids.5.074101
[6]. A. Das, M. Styslinger, D. M. Harris, and R. Zenit, “Force and torque-free helical tail robot to study low Reynolds number microorganism swimming,” arXiv preprint, arXiv:2112.00850, 2021. [Online]. Available: https://arxiv.org/abs/2112.00850
[7]. A. Zöttl and H. Stark, “Emergent behavior in active colloids,” Journal of Physics: Condensed Matter, vol. 28, no. 25, p. 253001, 2016. [Online]. Available: https://doi.org/10.1088/0953-8984/28/25/253001
Cite this article
Jin,Z. (2025). A Macroscale Model Approach to Studying Microswimmer Locomotion at Low Reynolds Numbers. Theoretical and Natural Science,106,64-71.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Mathematical Physics and Computational Simulation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. E. M. Purcell, “Life at low Reynolds number,” American Journal of Physics, vol. 45, no. 1, pp. 3–11, 1977. [Online]. Available: https://doi.org/10.1119/1.10903
[2]. E. M. Purcell, “Life at low Reynolds number,” American Journal of Physics, vol. 45, no. 1, pp. 3–11, 1977. [Online]. Available: https://doi.org/10.1119/1.10903
[3]. K. Magariyama and S. Kudo, “A mathematical explanation of backward swimming in bacterial flagellar motion,” Journal of Theoretical Biology, vol. 214, no. 4, pp. 541–551, 2002. [Online]. Available: https://doi.org/10.1006/jtbi.2001.2471
[4]. X. Huang, L. Yang, and P. Zhang, “Adaptive locomotion of artificial microswimmers in low Reynolds number environments,” Proceedings of the National Academy of Sciences, vol. 116, no. 5, pp. 2037–2042, 2019. [Online]. Available: https://pmc.ncbi.nlm.nih.gov/articles/PMC6357760/
[5]. A. C. H. Tsang, P. W. Tong, S. Nallan, and O. S. Pak, “Self-learning how to swim at low Reynolds number,” Physical Review Fluids, vol. 5, no. 7, p. 074101, 2020. [Online]. Available: https://journals.aps.org/prfluids/abstract/10.1103/PhysRevFluids.5.074101
[6]. A. Das, M. Styslinger, D. M. Harris, and R. Zenit, “Force and torque-free helical tail robot to study low Reynolds number microorganism swimming,” arXiv preprint, arXiv:2112.00850, 2021. [Online]. Available: https://arxiv.org/abs/2112.00850
[7]. A. Zöttl and H. Stark, “Emergent behavior in active colloids,” Journal of Physics: Condensed Matter, vol. 28, no. 25, p. 253001, 2016. [Online]. Available: https://doi.org/10.1088/0953-8984/28/25/253001