






1. Introduction
Non-invasive control systems based on EEG signals are becoming an essential tool in addressing movement disorders, cognitive impairments, and human-computer interaction, driven by the rapid advancements in neuroscience and brain-computer interface (BCI) technology. Steady-state visual evoked potentials (SSVEP), known for their high signal-to-noise ratio and stability, have become a widely used modality in BCI systems. SSVEP induces EEG activity at the stimulation frequency through visual stimuli and has become a popular non-invasive brain-computer interface due to its high transmission efficiency, low equipment requirements, and robustness. In recent years, with the growing popularity of smart devices and continuous innovation in BCI technology, SSVEP-BCI systems have made significant progress in the medical field, particularly in rehabilitation medicine and control of assistive devices for the disabled, while also demonstrating great potential for applications in non-medical fields like entertainment, industry, and the military [1,2]. For example, the SSVEP-BCI system has been successfully applied to virtual reality, robot control, smart home, and autonomous driving scenarios with a wide range of prospects. However, although SSVEP-BCI technology has achieved certain results, there are still technical challenges such as poor signal stability, high individual variability, poor system portability, and insufficient interaction naturalness in practical applications. Thus, this study aims to explore the generation mechanism of SSVEP, its application in brain-computer interface systems and the challenges it faces, and to analyse the latest progress of SSVEP-BCI technology. By reviewing and analyzing relevant literature, it focuses on SSVEP’s role in cognitive tasks, progress in EEG signal decoding methods, and the application of multimodal fusion with other physiological signals, providing a reference for the optimization and further application of SSVEP-BCI systems.
2. The relationship between SSVEP and brain function
2.1. The mechanism of SSVEP generation
SSVEP are are synchronized brain electrical activities generated in the visual cortex in response to visual stimuli of a specific frequency. SSVEP signals are classified into low-frequency (4-12 Hz), mid-frequency (12-30 Hz), and high-frequency (>30 Hz) categories according to the stimulation frequency [3]. Low-frequency signals are easy to detect but have a low signal-to-noise ratio, making them suitable for applications where signal quality is not a primary concern. Mid-frequency signals offer a good balance between signal-to-noise ratio and stability, making them suitable for most applications. High-frequency signals provide high temporal resolution and low noise, but their stability is poor and they require stringent experimental conditions. Common methods of inducing SSVEP include light stimulation, pattern stimulation, as well as pattern reversal stimulation. Light stimulation generates stable visual stimuli through precisely controlled light sources, thus making it suitable for experiments that require high signal stability. Pattern stimulation produces SSVEP through patterns or blocks that flash at a fixed frequency, offering ease of use and a good user experience, making it the most commonly used method, though signal instability may occur at high frequencies. Pattern reversal stimulation induces SSVEP by periodically changing the image pattern, providing a high signal-to-noise ratio and accuracy, making it suitable for tasks requiring high precision, but it demands greater attention and can induce cognitive load and fatigue in the subject. Each stimulation method has specific advantages and limitations in different applications, and selecting the appropriate one can optimize the performance and user experience of SSVEP-BCI systems.
2.2. The role of SSVEP in cognitive tasks
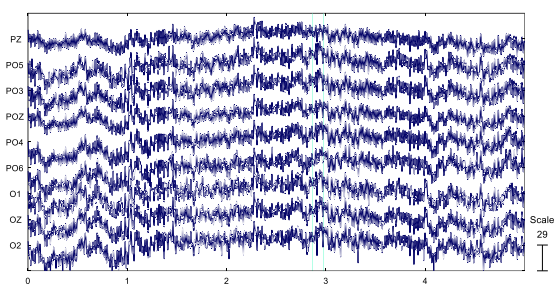
SSVEP, with its ability to evoke brain responses through visual stimuli at specific frequencies, is particularly suited for processing visual information within certain frequency ranges, offering efficient signal processing capabilities and good signal quality. Figure 1 illustrates the multi-channel EEG waveform of SSVEP, reflecting the brain's electrical response in the visual cortex under visual stimuli at different frequencies [4]. The amplitude and frequency characteristics of each waveform demonstrate the spatial and temporal distribution of SSVEP, thus providing theoretical support for optimizing brain-machine interface systems. The application of SSVEP mainly focuses on two areas: brain-machine interfaces and cognitive process research. In the context of brain-machine interfaces, SSVEP provides a stable signal source for non-invasive control. In cognitive research, SSVEP has been shown to effectively reflect processes related to visual attention, binocular rivalry, working memory, and brain rhythms. The response characteristics of SSVEP vary across different cognitive tasks. For example, in visual attention tasks, low- and mid-frequency SSVEP responses may reflect different cognitive processing stages. Low-frequency signals may be more sensitive to lower-level visual information processing, while mid-frequency signals are linked to more complex attention tasks. In working memory tasks, the stability and precision of SSVEP are crucial, as high-quality signals offer more stable indicators of cognitive states. Furthermore, SSVEP's application in clinical neuroscience is expanding, with uses in aging, neurodegenerative diseases, schizophrenia, ocular diseases, migraines, autism, depression, anxiety, stress, and epilepsy, offering valuable insights into these conditions.
3. SSVEP-based brain-machine interaction systems
BCIs are widely used in rehabilitation medicine and assistive control, enabling communication for individuals with motor disabilities by directly reading brain signals. Non-invasive BCIs typically rely on neuroimaging techniques such as functional magnetic resonance imaging (fMRI), functional near-infrared spectroscopy (fNIRS), EEG, and magnetoencephalography (MEG), with EEG being the primary technique used in research due to its high temporal resolution, portability, and low cost [5-7]. Common BCI signal modalities include P300, SSVEP, and motor imagery (MI). To improve system accuracy and robustness, multimodal brain-computer interfaces (hybrid BCI, hBCI) have been increasingly used, combining multiple signal modalities for better performance.
3.1. SSVEP-based multimodal BCI system
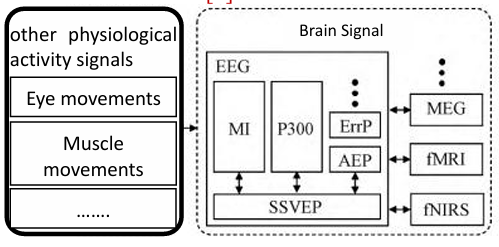
SSVEP is the main modality of non-invasive communication rate BCI systems. In order to boost performance, research has gradually focused on combining SSVEP with signals such as P300, MI, EOG, and fNIRS, to build multimodal brain-computer interfaces. Figure 2 illustrates the types of signals used to construct multimodal BCIs [5].
3.1.1. The combination of SSVEP and EEG signals
By focusing on periodic visual stimuli, SSVEP is generated, and its integration with other EEG modalities is realized through the combination of various tasks. For example, tasks independent of the gaze task, such as MI tasks, enable the fusion of SSVEP and MI, while multisensory stimulation, like combining visual and auditory stimuli, results in the integration of visually evoked potentials and auditory evoked potentials (AEP) [8]. Moreover, tasks triggered by visual stimuli, such as P300 signal acquisition, can also be combined with SSVEP. Furthermore, tasks that are causally related to the gaze task, such as detecting emotional changes or error potentials (ErrP) induced by erroneous visual feedback during the gaze task, can improve the performance of SSVEP-BCI systems [9,10]. Among these methods, systems that combine SSVEP with MI and P300 are the most extensively researched and applied, thanks to their high stability and versatility.
3.1.2. The combination of SSVEP and physiological signals
The combination of SSVEP with other physiological activity signals like eye tracking, EOG and EMG can further improve the performance and pervasiveness of brain-computer interfaces. Eye tracking, which monitors eye movements to determine the gaze area, can be combined with SSVEP for more precise target selection. For example, in speller applications, eye tracking is used to select a target region, while SSVEP is used to select specific targets within the region [11]. EOG signals, which reflect eye movements like blinking, can be used for basic control commands, such as turning the system on/off or confirming actions. Systems combining SSVEP and EOG are able to increase the size of the command set while maintaining a high level of comfort. EMG signals, which record muscle activity, enable control and, when combined with SSVEP, can optimize control logic. In a hybrid speller, a fist-clenching action can be used to confirm a choice or execute an auxiliary operation. These multimodal BCI systems offer more flexible control for users with varying needs, enhancing both accuracy and comfort.
3.1.3. The combination of SSVEP and brain activity signals
The combination of SSVEP with other brain activity signals aims to improve the accuracy and functionality of brain-computer interfaces through multimodal neurofunctional imaging. SSVEP is suitable for combining with other brain imaging techniques such as MEG, fMRI, and fNIRS, due to its fast response and high amplitude characteristics. MEG offers higher spatial resolution but is expensive and requires a controlled environment, while fMRI, though providing the highest spatial resolution, also comes with high equipment costs and complex data analysis. fNIRS has lower equipment costs and high portability, making it suitable for use in natural environments. The combination of these technologies, especially the integration of EEG and fMRI, allows SSVEP to reduce EEG artifacts caused by MRI gradient coils while maintaining the resolution of fMRI. Currently, multimodal brain-computer interface research is in its early stages, facing challenges such as equipment compatibility and signal matching. However, it shows potential for enhancing the richness and accuracy of brain neural activity information [12].
3.2. Encoding and decoding algorithms for SSVEP-BCI systems
SSVEP has become one of the three main BCI paradigms due to its stable evoked characteristics and high signal-to-noise ratio [13-15]. In SSVEP-BCI systems, the algorithm is mainly divided into two parts: encoding transforms feature information into stimuli, and decoding extracts information from EEG signals for accurate recognition. Researchers have developed decoding algorithms like CCA and TRCA, driving significant progress in SSVEP-BCI and their widespread use.
3.2.1. SSVEP encoding algorithms
The SSVEP-BCI system mainly use different encoding methods to achieve recognition and control of commands [16]. Frequency encoding uses flickering blocks with different frequencies to allow the subject to identify various commands, achieving high classification accuracy and information transfer rate [17]. Frequency-phase encoding combines frequency and phase information, resolving the amplitude-frequency issue and improving accuracy. Time-frequency encoding uses time-series with varied frequencies to reduce subjective fatigue and maintain high classification accuracy [18]. Space-frequency encoding leverages visual spatial information to increase the diversity of encoding paradigms, enhancing system performance and user experience. Hybrid encoding combines features like frequency, phase, and space, enhancing classification accuracy and control commands, leading to higher information transfer rate. The development of these encoding methods offers promising prospects for high-frequency SSVEP-BCI systems in communication and control applications.
3.2.2. SSVEP decoding algorithms
The decoding algorithm in SSVEP-BCI systems includes power spectral density analysis (PSDA), least absolute shrinkage and selection operator (LASSO), canonical correlation analysis (CCA), task-related component analysis (TRCA), discriminative canonical pattern matching (DCPM), and deep learning methods. PSDA uses Fourier transform to convert EEG signals from the time domain to the frequency domain, analyzing the amplitude characteristics of target stimulus frequencies for identification [19]. LASSO uses a penalty parameter for variable selection, shrinking irrelevant coefficients and extracting important features. CCA studies the correlation between two sets of variables, identifying the maximum correlation coefficient for classification [20]. TRCA enhances feature extraction by maximizing inter-trial covariance, thereby improving classification accuracy. The DCPM algorithm constructs discriminative spatial patterns, eliminating common-mode noise and is suitable for spatial information classification. Deep learning methods like PNN have also been applied in EEG signal decoding, although they have not yet shown significant advantages in high-frequency SSVEP-BCI. The development of these algorithms has improved the classification accuracy and information transfer rate of high-frequency SSVEP-BCI systems, providing technical support for practical applications.
4. Practical applications and challenges of SSVEP-BCI
BCI technology was firstly applied in medical diagnostics and rehabilitation medicine. As research in cognitive neuroscience has progressed and computer technology has developed, BCI technology has matured and expanded into new fields. SSVEP-based BCIs, known for their non-invasiveness, high information transfer rate, and strong classification accuracy, are widely used across various fields. Below is a detailed discussion of these applications [21-24].
4.1. Medical field
In the medical field, SSVEP-BCI technology is mainly used in rehabilitation medicine and assistive device control to help patients, especially those with disabilities, stroke patients and other groups, to achieve interaction with the outside world. By decoding EEG signals, SSVEP-BCI systems can control external devices, thus improving the quality of life of patients. For instance, Wang et al. created an assistive communication system using SSVEP signals, significantly enhancing stroke patients’ communication abilities [25]. In addition, the wearable BCI system designed by Qin Jun demonstrated the great promise of SSVEP-BCI in patient rehabilitation [26]. Although SSVEP-BCI has made some progress in the medical field, it still faces many challenges. Firstly, the nonlinearity and individual variability of EEG signals make decoding accuracy challenging, demanding high precision for patient rehabilitation. Secondly, ensuring the stability and comfort of the SSVEP-BCI system during prolonged use, particularly in terms of wearability, remains a challenge. Additionally, the high cost and usage threshold may hinder the widespread adoption of the technology. In the future, SSVEP-BCI development in medicine will focus on improving decoding accuracy and system stability through technologies like deep learning and transfer learning[27]. Asynchronous BCIs will enable more flexible control, enhancing rehabilitation. Advancements in wearable technology will make SSVEP-BCIs more convenient, comfortable, and accessible.
4.2. Non-medical field
In the non-medical field, SSVEP-BCI systems are widely used in entertainment, industrial, military, and other sectors. For example, in the entertainment industry, SSVEP-BCI can be used in virtual reality games and augmented reality systems to provide an immersive experience by controlling the movements of game characters or virtual objects through EEG signals. In industry, SSVEP-BCI can control robots and equipment, boosting efficiency and safety. In the military, its applications include controlling tasks in complex environments, such as asynchronous brain-controlled vehicles, thereby highlighting its potential for autonomous driving and unmanned systems [28]. Despite its great potential in non-medical fields, SSVEP-BCI still encounters challenges in practical applications. Firstly, EEG signal decoding delays may affect the system’s high real-time requirements, particularly in games, virtual reality, or autonomous driving, impacting user experience and safety. Secondly, the device’s portability and comfort pose limitations, especially for long-term wear. Additionally, the system’s reliability and stability need further optimization to ensure consistent performance in dynamic and complex environments. In the future, the development of SSVEP-BCI in non-medical fields will focus on improving system real-time performance and interactivity. By optimizing decoding algorithms and enhancing processing speed, low-latency, precise control can be achieved. Moreover, with advances in hardware technology, portable devices and non-invasive EEG signal acquisition will expand the application of SSVEP-BCI in broader scenarios. Hybrid BCI systems, combining SSVEP-BCI with other technologies, will become a key trend to meet complex application demands, especially in high-precision tasks such as autonomous driving and intelligent manufacturing.
5. Conclusion
This paper discusses the relationship between SSVEP and brain function, the generation mechanism of the SSVEP-BCI system and its application in cognitive tasks. By analyzing the coding and decoding algorithms of the SSVEP-BCI system, its extensive applications in both medical and non-medical fields are highlighted. Despite the remarkable progress of SSVEP-BCI technology, it still faces challenges such as nonlinearity and nonstationarity of EEG signals, individual variability, and limitations of system portability and interactive naturalness. Future SSVEP-BCI development will prioritize portability, flexible interaction, and robust, efficient, adaptable decoding algorithms. In addition, in-depth exploration of the combination of asynchronous BCI systems, multimodal BCI systems, and the use of new techniques like deep learning and migration learning will be a crucial development direction for SSVEP-BCI systems. This paper may provide theoretical foundations and practical guidance for the further development of SSVEP-BCI technology, with the potential to bring new breakthroughs in neuroscience, rehabilitation medicine, and human-computer interaction.
References
[1]. Ge, S., et al. (2021). SSVEP-based brain-computer interface with a limited number of frequencies based on dual-frequency biased coding. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 29, 760-769.
[2]. Zhao, X., Wang, Z., Zhang, M., et al. (2021). A comfortable steady state visual evoked potential stimulation paradigm using peripheral vision. Journal of Neural Engineering, 18(5), 056021.
[3]. Floriano, A., Carmona, V.L., Diez, P. F., et al. (2019). A study of SSVEP from below-the-hairline areas in low-, medium-, and high-frequency ranges. Research in Biomedical Engineering, 35(1), 71-76.
[4]. Tang, S. Z. (2023). Robotic arm control based on steady-state visual evoked potentials [M]. Nanjing University of Posts and Telecommunications.
[5]. Chi, X., Cui, H., & Chen, X. (2022). Progress of multimodal brain-computer interface combining steady-state visual evoked potentials. Chinese Journal of Biomedical Engineering, 41(2), 204-213.
[6]. Liu, J., & Wu, H. (2021). Hot spots and trends in brain-like intelligence research. Chinese Journal of Biomedical Engineering, 40(1), 91-98.
[7]. Chen, X., & Wang, Y. (2018). Research progress of non-invasive brain-computer interface based on EEG. Science and Technology Herald, 36(12), 22-30.
[8]. Carmona, L., et al. (2020). Multisensory stimulation and EEG recording below the hair-line: A new paradigm on brain-computer interfaces. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 28(4), 825-831.
[9]. Deng, C., Tong, J., Deng, X., et al. (2020). Emotion recognition positively correlates with steady-state visual evoked potential amplitude and alpha entrainment. Neuroscience, 434, 191-199.
[10]. Kalaganis, F.P., et al. (2017). A collaborative representation approach to detecting error-related potentials in SSVEP-BCIs. In Proceedings of the Thematic Workshops of ACM Multimedia 2017, 262-270.
[11]. Lim, J.H., et al. (2015). Development of a hybrid mental spelling system combining SSVEP-based brain-computer interface and webcam-based eye tracking. Biomedical Signal Processing and Control, 21, 99-104.
[12]. Zhou, Y., Song, X., He, F., et al. (2020). Progress of new multimodal neurofunctional imaging technology based on EEG. Chinese Journal of Biomedical Engineering, 39(5), 595-602.
[13]. Ehlers, J., Lueth, T., & Graeser, A. (2019). High frequency steady-state visual evoked potentials: An empirical study on re-test stability for brain-computer interface usage. In Proceedings of the 3rd International Conference on Computer-Human Interaction Research and Applications, 164-170.
[14]. Chen, X., Zhao, B., Wang, Y., et al. (2019). Combination of high-frequency SSVEP-based BCI and computer vision for controlling a robotic arm. Journal of Neural Engineering, 16(2), 026012.
[15]. Li, A., Alimanov, K., Fazli, S., et al. (2020). Towards paradigm-independent brain-computer interfaces. In Proceedings of the 2020 8th International Winter Conference on Brain-Computer Interface (BCI) (pp. 1-6). IEEE.
[16]. Abdelnabi, S., Huang, X., & Bulling, A. (2019). Towards high-frequency SSVEP-based target discrimination with an extended alphanumeric keyboard. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), 4181-4186.
[17]. Tsoneva, T., Garcia-Molina, G., & Desain, P. (2021). SSVEP phase synchronies and propagation during repetitive visual stimulation at high frequencies. Scientific Reports, 11(1), 4975.
[18]. Keihani, A., et al. (2018). Use of sine-shaped high frequency rhythmic visual stimuli patterns for SSVEP response analysis and fatigue rate evaluation in normal subjects. Frontiers in Human Neuroscience, 12, 201.
[19]. Materka, A., Byczyk, M., & Poryzala, P. (2007). A virtual keypad based on alternate half-field stimulated visual evoked potentials. In 2007 International Symposium on Information Technology Convergence, 296-300.
[20]. Wong, C. M., Wang, B., Wang, Z., et al. (2020). Spatial filtering in SSVEP-based BCIs: Unified framework and new improvements. IEEE Transactions on Biomedical Engineering, 67(11), 3057-3072.
[21]. Portnova, V. (2020). Lack of a sense of threat and higher emotional lability in patients with chronic microvascular ischemia as measured by non-linear EEG parameters. Frontiers in Neurology, 11, 122.
[22]. Alhalaseh, R., & Alhalaseh, S. (2020). Machine-learning-based emotion recognition system using EEG signals. Computers, 9(4), 95.
[23]. Zhang, R., Zong, Q., Dou, L., et al. (2021). Hybrid deep neural network using transfer learning for EEG motor imagery decoding. Biomedical Signal Processing and Control, 63, 102144.
[24]. Yang, M., Zhong, Z. P., Han, J., et al. (2022). A review of research on algorithms for decoding steady-state visual evoked potentials. Journal of Biomedical Engineering, 39(2), 416-425.
[25]. Wang, L., Li, X., Yang, C., et al. (2021). Development and validation of an assistive communication system based on steady-state visual evoked potential brain-computer interface for post-stroke language impairment. Chinese Journal of Stroke, 16(11), 1123-1130.
[26]. Qin, Z. (2020). Research on wearable brain-computer interface system for stroke rehabilitation [Doctoral dissertation, Shanghai Jiao Tong University].
[27]. Chiang, K. J., Wei, C.S., Nakanishi, M., et al. (2021). Boosting template-based SSVEP decoding by cross-domain transfer learning. Journal of Neural Engineering, 18(1), 016002.
[28]. Long, S. (2019). Vehicle static function manipulation technology based on brain-computer interface [Master’s thesis, National University of Defence Technology].
Cite this article
Zhu,J. (2025). An Investigation of a Brain-Computer Interaction System for Steady-State Visual Evoked Potentials. Theoretical and Natural Science,133,15-22.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of ICBioMed 2025 Symposium: AI for Healthcare: Advanced Medical Data Analytics and Smart Rehabilitation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Ge, S., et al. (2021). SSVEP-based brain-computer interface with a limited number of frequencies based on dual-frequency biased coding. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 29, 760-769.
[2]. Zhao, X., Wang, Z., Zhang, M., et al. (2021). A comfortable steady state visual evoked potential stimulation paradigm using peripheral vision. Journal of Neural Engineering, 18(5), 056021.
[3]. Floriano, A., Carmona, V.L., Diez, P. F., et al. (2019). A study of SSVEP from below-the-hairline areas in low-, medium-, and high-frequency ranges. Research in Biomedical Engineering, 35(1), 71-76.
[4]. Tang, S. Z. (2023). Robotic arm control based on steady-state visual evoked potentials [M]. Nanjing University of Posts and Telecommunications.
[5]. Chi, X., Cui, H., & Chen, X. (2022). Progress of multimodal brain-computer interface combining steady-state visual evoked potentials. Chinese Journal of Biomedical Engineering, 41(2), 204-213.
[6]. Liu, J., & Wu, H. (2021). Hot spots and trends in brain-like intelligence research. Chinese Journal of Biomedical Engineering, 40(1), 91-98.
[7]. Chen, X., & Wang, Y. (2018). Research progress of non-invasive brain-computer interface based on EEG. Science and Technology Herald, 36(12), 22-30.
[8]. Carmona, L., et al. (2020). Multisensory stimulation and EEG recording below the hair-line: A new paradigm on brain-computer interfaces. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 28(4), 825-831.
[9]. Deng, C., Tong, J., Deng, X., et al. (2020). Emotion recognition positively correlates with steady-state visual evoked potential amplitude and alpha entrainment. Neuroscience, 434, 191-199.
[10]. Kalaganis, F.P., et al. (2017). A collaborative representation approach to detecting error-related potentials in SSVEP-BCIs. In Proceedings of the Thematic Workshops of ACM Multimedia 2017, 262-270.
[11]. Lim, J.H., et al. (2015). Development of a hybrid mental spelling system combining SSVEP-based brain-computer interface and webcam-based eye tracking. Biomedical Signal Processing and Control, 21, 99-104.
[12]. Zhou, Y., Song, X., He, F., et al. (2020). Progress of new multimodal neurofunctional imaging technology based on EEG. Chinese Journal of Biomedical Engineering, 39(5), 595-602.
[13]. Ehlers, J., Lueth, T., & Graeser, A. (2019). High frequency steady-state visual evoked potentials: An empirical study on re-test stability for brain-computer interface usage. In Proceedings of the 3rd International Conference on Computer-Human Interaction Research and Applications, 164-170.
[14]. Chen, X., Zhao, B., Wang, Y., et al. (2019). Combination of high-frequency SSVEP-based BCI and computer vision for controlling a robotic arm. Journal of Neural Engineering, 16(2), 026012.
[15]. Li, A., Alimanov, K., Fazli, S., et al. (2020). Towards paradigm-independent brain-computer interfaces. In Proceedings of the 2020 8th International Winter Conference on Brain-Computer Interface (BCI) (pp. 1-6). IEEE.
[16]. Abdelnabi, S., Huang, X., & Bulling, A. (2019). Towards high-frequency SSVEP-based target discrimination with an extended alphanumeric keyboard. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), 4181-4186.
[17]. Tsoneva, T., Garcia-Molina, G., & Desain, P. (2021). SSVEP phase synchronies and propagation during repetitive visual stimulation at high frequencies. Scientific Reports, 11(1), 4975.
[18]. Keihani, A., et al. (2018). Use of sine-shaped high frequency rhythmic visual stimuli patterns for SSVEP response analysis and fatigue rate evaluation in normal subjects. Frontiers in Human Neuroscience, 12, 201.
[19]. Materka, A., Byczyk, M., & Poryzala, P. (2007). A virtual keypad based on alternate half-field stimulated visual evoked potentials. In 2007 International Symposium on Information Technology Convergence, 296-300.
[20]. Wong, C. M., Wang, B., Wang, Z., et al. (2020). Spatial filtering in SSVEP-based BCIs: Unified framework and new improvements. IEEE Transactions on Biomedical Engineering, 67(11), 3057-3072.
[21]. Portnova, V. (2020). Lack of a sense of threat and higher emotional lability in patients with chronic microvascular ischemia as measured by non-linear EEG parameters. Frontiers in Neurology, 11, 122.
[22]. Alhalaseh, R., & Alhalaseh, S. (2020). Machine-learning-based emotion recognition system using EEG signals. Computers, 9(4), 95.
[23]. Zhang, R., Zong, Q., Dou, L., et al. (2021). Hybrid deep neural network using transfer learning for EEG motor imagery decoding. Biomedical Signal Processing and Control, 63, 102144.
[24]. Yang, M., Zhong, Z. P., Han, J., et al. (2022). A review of research on algorithms for decoding steady-state visual evoked potentials. Journal of Biomedical Engineering, 39(2), 416-425.
[25]. Wang, L., Li, X., Yang, C., et al. (2021). Development and validation of an assistive communication system based on steady-state visual evoked potential brain-computer interface for post-stroke language impairment. Chinese Journal of Stroke, 16(11), 1123-1130.
[26]. Qin, Z. (2020). Research on wearable brain-computer interface system for stroke rehabilitation [Doctoral dissertation, Shanghai Jiao Tong University].
[27]. Chiang, K. J., Wei, C.S., Nakanishi, M., et al. (2021). Boosting template-based SSVEP decoding by cross-domain transfer learning. Journal of Neural Engineering, 18(1), 016002.
[28]. Long, S. (2019). Vehicle static function manipulation technology based on brain-computer interface [Master’s thesis, National University of Defence Technology].