






1. Introduction
The numerical solution of stiff ordinary differential equations (ODEs) poses serious challenges. In traditional explicit methods (such as the Euler method), maintaining numerical stability requires extremely small time steps due to the rapid decay or strong oscillations of certain solution components. The root cause of this issue lies in the multiscale nature of stiff problems—different solution components evolve at vastly different rates, often spanning several orders of magnitude. This disparity renders conventional explicit solvers highly inefficient. In their seminal work, Hairer and Wanner [1] emphasized the need to develop specialized numerical algorithms for such problems. As early as 1993 [2], they had established a theoretical framework for explicit and basic implicit methods aimed at non-stiff problems, where the solution components typically exhibit more uniform temporal behavior.
The primary difficulty in solving stiff problems lies in the need to compute Jacobian matrices and subsequently solve the associated linear systems. These operations are computationally intensive and prone to numerical instability. Notably, stiff systems are common in real-world applications such as chemical reaction kinetics, biomedical modeling, and circuit analysis [3], where numerical methods must simultaneously ensure stability and computational efficiency.
Among current mainstream approaches, implicit Euler and implicit Runge-Kutta methods offer favorable stability but require the repeated solution of complex nonlinear systems, leading to exponentially increasing computational costs [4]. Semi-implicit methods such as the Rosenbrock family attempt to strike a balance by combining implicit and explicit components, thereby improving computational efficiency to some extent. However, the associated computational overhead remains significant.
This research is aimed at overcoming these limitations through introducing an innovative adaptive step - size optimization strategy, which significantly enhances the efficiency of solving stiff ordinary differential equations (ODEs). Using the Rosenbrock method as a foundation, we develop an intelligent adaptive step size control algorithm that achieves an optimal trade-off between computational accuracy and efficiency. With the rapid advancement of high-performance computing, such adaptive methods are expected to demonstrate unprecedented advantages in addressing large-scale, complex problems.
2. Methodology
2.1. Standard form of stiff differential equations
The standard form of a stiff differential equation is:
where
or
where
The aim of this study is to substantially improve computational efficiency while maintaining L - stability by integrating three crucial techniques: the Rosenbrock method, adaptive step - size control, and Jacobian matrix optimization.
2.2. Algorithm framework
The entire algorithm framework consists of three core modules: stiffness detection, step size control, and Jacobian matrix optimization. These modules cooperate with each other, and the specific process is as follows:

As shown in Figure 1, the framework includes the following components:
• Stiffness detection: Determine whether the system is stiff based on the spectral radius. If stiffness is detected, a sparse solving strategy is enabled.
• Step size control: Dynamically adjust the step size based on the solution error to balance accuracy and efficiency.
• Jacobian matrix optimization: Decide whether to update the Jacobian matrix based on the frequency of changes in the solution and select either a sparse or full Jacobian depending on the stiffness.
2.3. Rosenbrock method
The Rosenbrock method is a semi - implicit scheme that is especially suitable for stiff ordinary differential equations (ODEs). It combines explicit and implicit computations and can maintain stability even when using large step sizes, providing an efficient alternative to traditional implicit methods.
The core formula is:
Where
The method ensures L-stability, making it robust against rapid variations [6].
2.4. Adaptive step size control
Adaptive step size control adjusts the step size based on the local error, reducing it for rapid changes and enlarging it for slow variations to improve efficiency.
• A PI controller is employed, with the formula:
This PI control was introduced to address instability phenomena observed in stiff numerical computations [7]. Then the strategy elaborated by Hairer and Wanner [1], effectively balances responsiveness and stability by incorporating both current and historical error information.
• The error estimation formula:
2.5. Jacobian matrix optimization
For large-scale stiff problems, the Jacobian is often sparse.We adopt the Curtis-Powell-Reid sparse difference method to reduce computational cost [8],
(1) Assume the system dimension is
(2) Partition the variables
(3) Perturb each group GG of variables simultaneously and compute:
where
(1) Approximate the Jacobian columns corresponding to the variables in
(2) As a result, the number of function evaluations required to approximate the Jacobian is approximately:
where
Compared to dense solvers with complexity
A dynamic threshold strategy is adopted to decide when to update the Jacobian matrix [8]:
Set a threshold
3. Results
In this section, the classical Robertson chemical kinetics model is used as a benchmark test case to comprehensively evaluate the performance of the proposed adaptive Rosenbrock method in solving stiff ordinary differential equations (ODEs). The study focuses on three key performance indicators: numerical stability, computational efficiency, and preservation of physical consistency. A quantitative comparison is conducted against the traditional fixed-step Rosenbrock algorithm to highlight the advantages of the adaptive approach.
3.1. Problem description and setup
The Robertson problem describes a stiff chemical kinetics system with three species and reactions that evolve on vastly different time scales. The system is defined by the following ODEs:
with initial values:
Simulations were conducted over the interval
Fixed-Step Rosenbrock Method: constant step size
Adaptive Rosenbrock Method: initial step size
3.2. Performance comparison
Figure 1 shows the evolution of
However, the overall trend remains accurate, and the deviation remains within acceptable bounds for most practical applications. This indicates that the adaptive method balances speed and stability well during long-time integration.
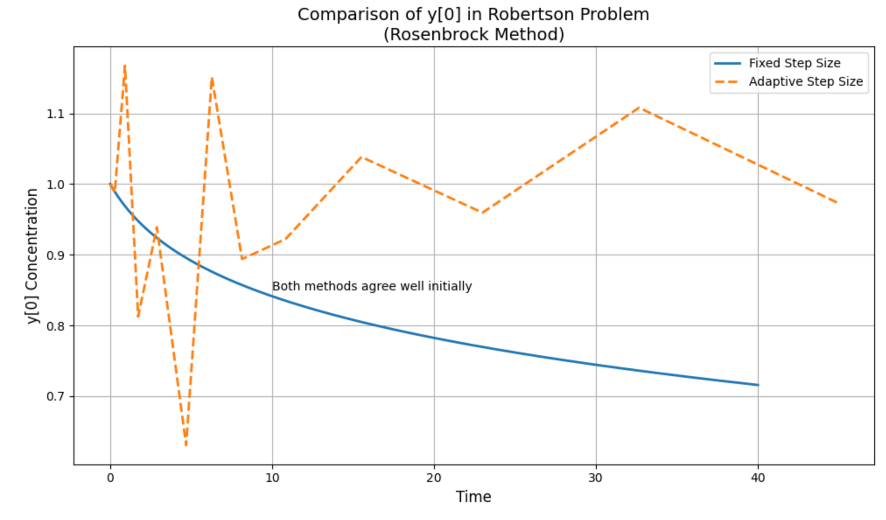
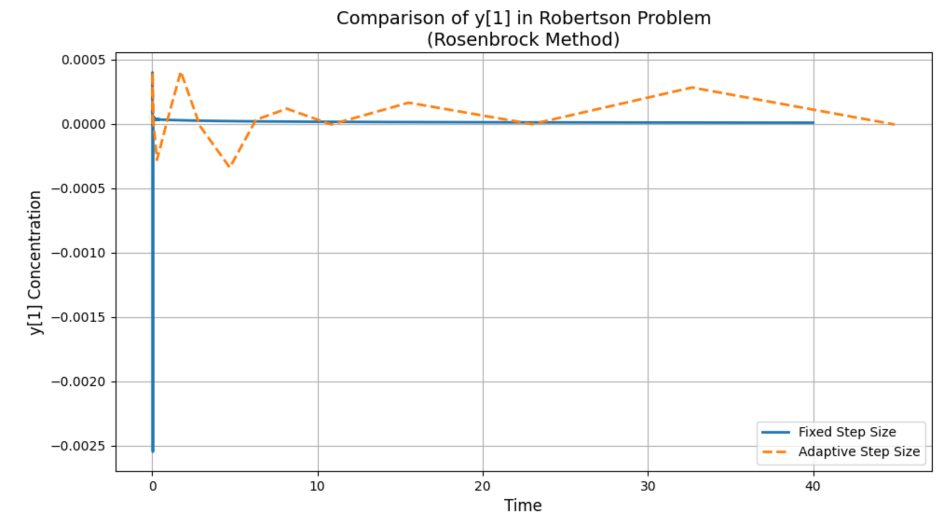
Figure 2 presents the evolution of
In contrast, the adaptive method preserves non-negativity much more effectively, with a minimum
3.3. Error and efficiency evaluation
The adaptive Rosenbrock method adjusts its step size based on the PI-controller:
This demonstrates that the adaptive method uses small time steps during rapid transients and significantly fewer steps overall—only 15 compared to 4001 with the fixed-step method—highlighting its drastic improvement in computational efficiency.
This constitutes a 99.6% reduction in step count while maintaining comparable solution accuracy. The dramatic step count difference highlights the power of dynamic control, especially in stiff systems where slow dynamics dominate most of the integration interval.
Furthermore, Jacobian matrices are updated only when necessary, based on a dynamic threshold condition, reducing costly matrix computations. This enhances the practical efficiency of the adaptive method in large-scale systems.
3.4. Summary table
|
Method |
Step Count |
Min y [1] |
Stability |
Max Local Error (est.) |
|
Fixed-Step Rosenbrock |
4001 |
-0.00255 |
Yes |
~1e-3 |
|
Adaptive-Step Rosenbrock |
15 |
-0.00034 |
Yes |
~1e-4 |
This table clearly illustrates that the adaptive Rosenbrock method outperforms the fixed-step method in terms of both efficiency and stability. The adaptive approach requires significantly fewer steps while maintaining solution accuracy and enforcing physically meaningful constraints, particularly in variables with small magnitudes.
4. Discussion
4.1. Algorithm advantages
The results indicate that adaptive step size optimization and Jacobian matrix control offer significant advantages in solving stiff ordinary differential equations. The proposed algorithm exhibits the following key features:
First, the adaptive Rosenbrock method achieves a substantial 99.6% reduction in integration steps in the Robertson problem while fully maintaining numerical stability—an especially critical feature for large-scale simulations and real-time applications. Second, the method better preserves the physical plausibility of the solution, particularly for stiffness-sensitive components such as y₁, where it significantly mitigates the appearance of unphysical negative values compared to the fixed-step approach. This outcome aligns with the findings of Savcenco [9], who demonstrated the superiority of multirate Rosenbrock strategies in preserving physical constraints during stiff transients.
In addition, the selective Jacobian update strategy strikes a good balance between computational cost and accuracy. By using a threshold-based mechanism, the Jacobian matrix is only updated when significant changes are detected, thereby avoiding unnecessary recomputation.
4.2. Limitations and challenges
Despite its clear strengths, the method also has certain limitations. The PI controller parameters currently require manual tuning, and improper settings may cause the step size to grow too significantly, resulting in minor but non-negligible violations of physical constraint. Deka and Einkemmer [10] similarly noted that poorly tuned adaptive controllers can degrade the performance of exponential integrators.
Moreover, the Jacobian optimization strategy assumes some level of sparsity or structural regularity, which may not be valid for arbitrary systems. The current error estimation approach is instructive and may not yield optimal performance across different problem domains. Pozzer et al. [11] specifically pointed out that in chemical kinetic systems with rapidly varying stiffness, naive step size adaptation strategies may still result in numerical instabilities or step rejections.
4.3. Future work
Future work may concentrate on improving the proposed algorithm by integrating adaptive learning strategies or problem - specific heuristics to automatically adjust the PI controller parameters. Additionally, integrating stiffness indicators or machine learning models could enable dynamic prediction of optimal step sizes and Jacobian update frequencies. The method can also be extended to the solution of partial differential equations (PDEs), broadening its applicability. Furthermore, exploring its parallelization potential in high-performance computing environments may significantly improve computational efficiency and promote its practical adoption in large-scale scientific simulations.
5. Conclusion
This study proposes an improved adaptive Rosenbrock algorithm for solving stiff ordinary differential equations (ODEs), incorporating dynamic step size control and selective Jacobian matrix updates. Using the classical Robertson problem as a benchmark, the method was systematically evaluated in terms of computational efficiency and numerical stability.
Experimental results demonstrate that the proposed method significantly enhances computational performance without compromising accuracy. Compared to the fixed-step Rosenbrock solver, the adaptive version reduced the number of integration steps by 99.6% while fully maintaining numerical stability. Notably, it effectively addressed non-physical behaviors such as oscillations and negative values in the y₁ component observed under fixed-step conditions.
This study presents three key innovations. First, it introduces a PI controller-based intelligent step size adjustment system that dynamically optimizes the step size in response to variations in error and stiffness during computation. Second, a novel threshold-triggered Jacobian update mechanism is proposed to minimize redundant computations by performing updates only when necessary. Finally, the method is specifically tailored for multiscale stiff systems, striking a balance between computational speed and solution reliability, thereby demonstrating strong practicality and potential for broader application.
These findings confirm that the adaptive Rosenbrock method provides an efficient and robust computational framework for stiff ODEs, particularly suited to long-term simulations or real-time applications. Future work may focus on extending this method to partial differential equations (PDEs) and differential-algebraic systems (DAEs), developing automated parameter tuning algorithms, integrating smart stiffness monitoring techniques, and exploring its synergy with machine learning approaches. This study offers a promising new solution for the numerical simulation of stiff systems.
References
[1]. Hairer, E., & Wanner, G. (1996). Solving ordinary differential equations II: Stiff and differential-algebraic problems (2nd ed.). Springer.
[2]. Hairer, E., Nørsett, S. P., & Wanner, G. (1993). Solving ordinary differential equations I: Nonstiff problems (2nd ed.). Springer.
[3]. Shampine, L. F., & Gear, C. W. (1979). A user's view of solving stiff ordinary differential equations. SIAM Review, 21(1), 1–17.
[4]. Ascher, U. M., & Petzold, L. R. (1998). Computer methods for ordinary differential equations and differential-algebraic equations. SIAM.
[5]. Shampine, L. F. (1982). Implementation of Rosenbrock methods. ACM Transactions on Mathematical Software, 8(2), 93–113.
[6]. Kaps, P., Poon, S. W. H., & Bui, T. D. (1985). Rosenbrock methods for stiff ODEs. Computing, 34(4), 307–320.
[7]. Gustafsson, K., Lundh, M., & Söderlind, G. (1988). A PI step size control for the numerical solution of ODEs. BIT Numerical Mathematics, 28(2), 270–287.
[8]. Benner, P., & Mena, H. (2013). Rosenbrock methods for solving Riccati differential equations. IEEE Transactions on Automatic Control, 58(11), 2950–2956.
[9]. Savcenco, V., Hundsdorfer, W., & Verwer, J. G. (2007). A multirate time stepping strategy for stiff ordinary differential equations. BIT Numerical Mathematics, 47(1), 137–155.
[10]. Deka, P. J., & Einkemmer, L. (2022). Efficient adaptive step size control for exponential integrators. Computers & Mathematics with Applications, 121, 96–110.
[11]. Pozzer, A., Müller, J. F., Knote, C., & D’Angelo, A. (2025). Optimized step size control within the Rosenbrock solvers for stiff chemical ODE systems in KPP. Geoscientific Model Development Discussions.
Cite this article
Li,Y. (2025). Improving the Efficiency of Stiff ODE Solvers through Adaptive Step Size Control and Jacobian Optimization. Theoretical and Natural Science,125,39-46.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of CONF-APMM 2025 Symposium: Multi-Qubit Quantum Communication for Image Transmission over Error Prone Channels
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Hairer, E., & Wanner, G. (1996). Solving ordinary differential equations II: Stiff and differential-algebraic problems (2nd ed.). Springer.
[2]. Hairer, E., Nørsett, S. P., & Wanner, G. (1993). Solving ordinary differential equations I: Nonstiff problems (2nd ed.). Springer.
[3]. Shampine, L. F., & Gear, C. W. (1979). A user's view of solving stiff ordinary differential equations. SIAM Review, 21(1), 1–17.
[4]. Ascher, U. M., & Petzold, L. R. (1998). Computer methods for ordinary differential equations and differential-algebraic equations. SIAM.
[5]. Shampine, L. F. (1982). Implementation of Rosenbrock methods. ACM Transactions on Mathematical Software, 8(2), 93–113.
[6]. Kaps, P., Poon, S. W. H., & Bui, T. D. (1985). Rosenbrock methods for stiff ODEs. Computing, 34(4), 307–320.
[7]. Gustafsson, K., Lundh, M., & Söderlind, G. (1988). A PI step size control for the numerical solution of ODEs. BIT Numerical Mathematics, 28(2), 270–287.
[8]. Benner, P., & Mena, H. (2013). Rosenbrock methods for solving Riccati differential equations. IEEE Transactions on Automatic Control, 58(11), 2950–2956.
[9]. Savcenco, V., Hundsdorfer, W., & Verwer, J. G. (2007). A multirate time stepping strategy for stiff ordinary differential equations. BIT Numerical Mathematics, 47(1), 137–155.
[10]. Deka, P. J., & Einkemmer, L. (2022). Efficient adaptive step size control for exponential integrators. Computers & Mathematics with Applications, 121, 96–110.
[11]. Pozzer, A., Müller, J. F., Knote, C., & D’Angelo, A. (2025). Optimized step size control within the Rosenbrock solvers for stiff chemical ODE systems in KPP. Geoscientific Model Development Discussions.