






1. Introduction
Tactile perception and sensors are increasingly utilized in the current market to enhance human quality and overall well-being. This technology, applied in multiple fields, especially in medical rehabilitation and human-computer interaction can sense external physical stimuli and provide instant feedback, showing great potential in prosthetic devices, medical rehabilitation, and sports protection. Recent years have seen, tactile perception technology has made remarkable progress in both performance and application scope, with researchers working on intelligent touch-sensing systems for prosthetic devices. The development of these technologies not only helps improve the user experience of prosthetic devices but also provides more effective support for medical rehabilitation. In addition, some researchers have put forward design concepts for the future by using existing technologies, combining bionic manufacturing of prosthetics, and designing hardware and tactile perception systems, further deepening the development of tactile perception technology. However, despite many advances, tactile perception technology still faces many challenges. One of the most critical issues is how to further improve the accuracy and reliability of tactile perception.
Through the analysis of existing research results, this paper discusses the potential of tactile perception technology in improving the quality of human life and assisting functional recovery, and puts forward prospects for future development directions, aiming to provide theoretical support and practical guidance for future technological innovation and application expansion, promote more efficient and accurate perception and interaction of this technology in related fields, and further improve the quality of life and health level of disabled people and athletes.
2. Overview of tactile perception technology
Human limbs can bear different weights and manipulate the body, which is attributed to the complex musculoskeletal structure innervated by motor sensory nerves. The loss of the upper limb or hand largely affects daily life. To restore or obtain motor function and perception, it is often necessary to purchase expensive equipment and bear certain risks, which is not only a problem with prosthetic hands. The development of prosthetics with high flexibility, strong sensitivity, affordability, and good durability requires the realization and innovation of better performance through information collection, information conversion, and signal processing to form tactile perception technology.
As early as the 1980s, scientists used principles and methods such as resistance, capacitance, piezoelectricity, and pyroelectricity to manufacture sensors for industrial automation. Developed to date, for example, in 2008, Japan developed a piezoelectric three-dimensional force tactile sensor and applied it to the end of a robot's dexterous finger to simulate the information of liver lesions during surgery, or the widely concerned GelSight series, all reflecting the rapid progress of tactile perception technology in recent years. However, many functional prosthetics used in medical rehabilitation have negative factors. In order to better improve these factors, researchers use tactile perception technology, such as collecting surface electromyographic signals (sEMG), reducing hardware costs, optimizing and iterating software engineering, and using more advanced or improved sensors to better restore and simulate natural tactile perception. On this basis, they keep improving, pursue higher cost performance, more accurate data transmission, and more intelligent hardware devices to provide convenience for the disabled.
3. Design and application of tactile perception prosthetics
3.1. Tactile perception application of dentures and bone perception of masticatory function
Edentulous patients lose periodontal and related receptors, and patients can choose to wear different receptors to produce bone perception by stimulating muscles [1-2]. Researchers have compared the effects of active and passive tactile perception under different devices by means of stimulating different receptors. On the one hand, it is passive tactile perception, but such research is rare and difficult to operate, and only two studies have measured this data. Pressure is applied to dental implants through complex equipment, and the patient's perception ability is tested according to the pressure level. On the other hand, active tactile perception is more common and easy to implement. It is based on natural dentition or wearing dentures to perceive metal foils of different thicknesses, measured in microns. By making a table summary of the relevant conclusions in recent years, it is finally concluded that although the passive and active tactile perception thresholds of implant dentures are not very different, they are slightly lower than those of natural dentition. Table 1 shows the sensitivity and prosthesis types involved in each investigation.
|
Author and Year |
Tactile Sensiblity Studied |
Natural Dentition Thresholds |
Implant Prosthesis Thresholds |
Complete Dentures Thresholds |
|
Negahdari, 2019 |
Active |
Yes |
Yes |
No |
|
Shala, 2017 |
Active |
Yes |
Yes |
Yes |
|
Kazemi, 2013 |
Active |
Yes |
Yes |
No |
|
Reveredo, 2013 |
Active |
Yes |
Yes |
No |
|
Enkling, 2012 |
Active |
Yes |
Yes |
No |
|
Grieznis, 2010 |
Passive |
Yes |
Yes |
No |
|
Enkling, 2010 |
Active |
Yes |
No |
No |
|
Batista, 2008 |
Active |
Yes |
Yes |
Yes |
|
Enkling, 2007 |
Active |
Yes |
Yes |
No |
|
El Sheik, 2004 |
Passive |
No |
Yes |
No |
3.2. Design of flexible exoskeleton multifunctional sports protective gear and multifunctional flexible perception system
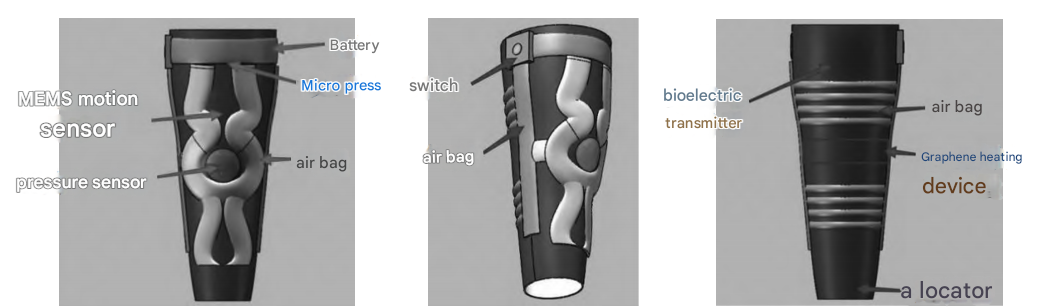
Due to the decline of physical functions in the elderly or the impairment of motor skills caused by diseases, life is difficult to take care of itself, and the cost of artificial nursing treatment is high, which many families cannot afford. Therefore, researchers have designed the concept of equipment with protection and rehabilitation training functions to reduce labor costs. In the knee protection structure, microcompressors, air pillars, etc. are configured to cooperate with the MEMS motion system to form more accurate dynamic data, and then electric collectors, pressure sensors, and motion sensors are used to control the airbags [12]. Considering the need for cold and hot adjustments before and after activities, a temperature hysteresis compensation algorithm is proposed to improve the temperature measurement accuracy and comfort. The pressure signal is also calibrated, and the least square method is used to fit the pressure-pressure curve to control the system between 0.5N and 5N with high accuracy. These can be integrated into the full-body flexible exoskeleton protective gear to further promote intelligent perception and response. At the same time, using Bowden cable drive instead of traditional motor link, the structure is simplified to achieve the advantages of light weight and high-efficiency drive. As shown in Figure 1, researchers have designed a flexible exoskeleton multifunctional protective gear that includes the above-mentioned applications of tactile perception technology and reasonably simulates it.
3.3. Prosthetic hand
The hand is one of the most essential organs in the human body, enabling individuals to perform a wide range of high-precision tasks. It is a powerful interactive tool for feeling and acting. In recent years, due to factors like aging and cardiovascular diseases, the number of people with upper limb amputation or disability has exceeded 2.26 million and continues to rise [14]. Research into prosthetic hands can make up for some functions and provide convenience. Currently, there are mainly two types of prosthetic hands. The first is the appearance hand, which is made of rubber and imitates the appearance, but lacks functions. The second type, active prostheses, offers some degree of functionality controlled by the user, although issues such as high cost and low comfort remain challenges to be addressed. Researchers have been collecting surface electromyographic signals (sEMG)since 1974 for action intention recognition [15]. By 2020, they had combined convolutional neural network models to achieve gesture intention recognition accuracy rate of 97.9% [16]. This paper reviews the myoelectric control systems and tactile sensors designed by three groups of researchers for sorting out [14, 17, 18].
One team established a surface tactile signal and myoelectric control based on vibration tactile feedback [14]. The overall structure of the prosthetic hand includes: power module, myoelectric control module, tactile feedback module, and bionic manipulator. The myoelectric control module collects myoelectric signals through the MYO arm ring, extracts Hjorth parameters for data processing using a fourth-order Butterworth filter, improves the feedforward neural network, and can respond in an average of 204 ms. It can identify five actions: fist clenching, hand opening, pinching, grasping, and supporting, controling a linear actuator to make corresponding actions. The tactile feedback module innovatively uses 14 pressure sensors (FSR) distributed across the prosthetic hand to collect contact force and sliding signals, and then converts the tactile information into vibration stimulation by vibrating 14 miniature brushless motors, which is fed back to the outside of the upper arm. The system also includes hardware and software designs that have been validated through experiments, achieving advantages of multimodal closed-loop control, light weight, low cost, and high compatibility.
To establish a skin impedance model, the second group first created a circuit model including skin impedance and used Sim4Life software to simulate the three-dimensional real response to obtain the electric field distribution and nerve induction potential [17]. Then, single-amplitude, pulse width, frequency, and multi-parameter collaborative tests were carried out to optimize the electro-tactile stimulation, providing flexibility for coding. Finally, a virtual grasping ability training system was built, integrating myoelectric signal collection, grasping force estimation, and electro-tactile feedback modules to construct a closed-loop two-way human-machine interface.
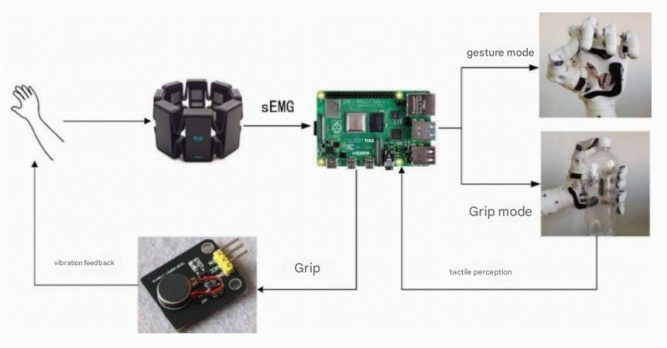
Another group used ARM microcomputer motherboards, etc., as the main part of the air to collect and process sEMG signals. A sixth-order Butterworth band-pass filter (20-100Hz) was used to remove power frequency interference and motion artifacts, and retain effective myoelectric signals. The traditional moving average method was improved, and the polynomial fitting of the S-G convolution smoothing algorithm was introduced to accurately locate the start and end points of the action and effectively reduce the interference of the pseudo-active segment. The fruit fly algorithm (FOA) optimized the classification model by iterating the smoothing factor of WPNN. Overall, the integration of myoelectric control and vibration feedback successfully constructed a closed loop of "perception-decision-execution-feedback", improving the force-tactile interaction of the prosthetic hand. Figure 2 illustrates the the prosthetic hand system.
4. Challenges and future prospects
Tactile perception has many deficiencies and areas for improvement in various medical rehabilitation fields. In dental implantology, research on the tactile perception threshold of complete dentures is limited compared to implant dentures, and there are no receptors available for stimulating the periodontal or peri-implant tissues. Therefore, complete dentures can only measure and improve data through active tactile perception. Additionally, the understanding of bone perception is limited, with inconsistent methodology leading to contradictory results.
In the realm of prosthetic hands, many designs have restricted degrees of freedom, cannot have both aesthetics and functionality, and it is difficult to reduce costs, resulting in the inability to popularize good products. Studies indicate that vibration feedback modes are relatively simple, tactile spatial positioning is not achievable, and the types of gestures that can be recognized are very limited. Furthermore, the established skin impedance model is not perfect, and the tactile feedback that the electro-tactile stimulation coding can provide is also very limited.
In the future, the accuracy of sensors and the efficiency of drivers can be further optimized, control sensitivity and battery life can be improved, mechanical impedance can be effectively reduced, and it can be widely used in daily life assistance for the elderly, rehabilitation training for people with motor dysfunction, or protection fields. It also provides new ideas for the medical rehabilitation field by using exoskeleton technology.
In contrast, the prosthetic hand has formed a myoelectric control system with high performance and low cost, and its action classification accuracy and grasping ability have reached the practical level, which can become a life assistance tool for upper limb amputees.
5. Conclusion
Tactile perception technology can be more deeply applied in the field of medical rehabilitation. This paper combs the applications of three different types of tactile perception technologies. Through some completed studies on dentures, researchers have sorted out and compared the natural dentition and implant dentition, proving that the current tactile perception technology is being further improved, and the sensory system of implant dentition is further approaching the natural dentition. The design scheme of sports protective gear installs the MEMS system to further optimize the auxiliary equipment for the elderly or disabled people. The functional and popularized beautiful vision of the prosthetic hand indicates the direction of full bionics and intelligence, significantly improving people's quality of life.
However, in the design, researchers can improve one aspect in a targeted manner, which also leads to the shortcomings and deficiencies of other aspects. In the design of the prosthetic hand, researchers have added the recognition and memory of many sign language actions in the system, but the accuracy of gesture recognition and output cannot be improved. In the future, tactile perception technology can aim at all-round development and approach human simulation.
However, this paper has some shortcomings. It primarily emphasizes the current progress and application effects of technologies, lacking a thorough discussion on the limitations and potential problems of technologies is not deep enough. Future developments in tactile perception technology should aim for comprehensive performance improvements, focusing on multimodal perception fusion, high-precision gesture recognition, personalized design, and interdisciplinary cooperation. Through these efforts, tactile perception technology is expected to achieve a wider range of applications in medical rehabilitation, prosthetic design, and sports protection, thereby significantly improving people's quality of life.
References
[1]. González-Gil, D., Flores-Fraile, J., & López-Marcos, J. (2022). Tactile sensitivity thresholds in implant prosthesis, complete dentures, and natural dentition: A review of their value in literature. Medicina (Kaunas, Lithuania), 58(4), 501.
[2]. Enkling, N., Heussner, S., Nicolay, C., Bayer, S., Mericske-Stern, R., & Utz, K. H. (2012). Tactile sensibility of single-tooth implants and natural teeth under local anesthesia of the natural antagonistic teeth. Clinical Implant Dentistry and Related Research, 14, 273–280. https: //doi.org/10.1111/j.1708-8208.2011.00340.x
[3]. El Sheik, A. M. (2004). Passive tactile sensibility in edentulous subjects treated with dental implants: A pilot study. Journal of Prosthetic Dentistry, 91, 26–32. https: //doi.org/10.1016/j.prosdent.2003.09.014
[4]. Grieznis, L., Apse, P., & Blumfelds, L. (2010). Passive tactile sensibility of teeth and osseointegrated dental implants in the maxilla. Stomatologija, 12, 80–86.
[5]. Negahdari, R., Ghavimi, M., Ghanizadeh, M., & Bohlouli, S. (2019). Active tactile sensibility of three-unit implant-supported fixed partial dentures versus natural dentition. Journal of Clinical and Experimental Dentistry, 11, e636–e641. https: //doi.org/10.4317/jced.56509
[6]. Shala, K. S., Dula, L. J., Pustina-Krasniqi, T., Bicaj, T., Ahmedi, E. F., Lila-Krasniqi, Z., & Tmava-Dragusha, A. (2017). Evaluation of sensibility threshold for interocclusal thickness of patients wearing complete dentures. International Journal of Dentistry, 2017, 1–5. https: //doi.org/10.1155/2017/2356421
[7]. Kazemi, M., Geramipanah, F., Negahdari, R., & Rakhshan, V. (2014). Active tactile sensibility of single-tooth implants versus natural dentition: A split-mouth double-blind randomized clinical trial. Clinical Implant Dentistry and Related Research, 16, 947–955. https: //doi.org/10.1111/cid.12001
[8]. Reveredo, A. M., Shetty, S., Babu, C. S., Kumar, G. S., Priya, K. S., Pandurangappa, R., & Shetty, A. (2013). Evaluation of active tactile perception of single tooth implant prosthesis. International Journal of Oral Implant and Clinical Research, 4, 1–6.
[9]. Enkling, N., Utz, K. H., Bayer, S., & Stern, R. M. (2010). Osseoperception: Active tactile sensibility of osseointegrated dental implants. International Journal of Oral and Maxillofacial Implants, 25, 1159–1167.
[10]. Batista, M., Bonachela, W., & Soares, J. (2008). Progressive recovery of osseoperception as a function of the combination of implant-supported prostheses. Clinical Oral Implants Research, 19, 565–569. https: //doi.org/10.1111/j.1600-0501.2007.01479.x
[11]. Enkling, N., Nicolay, C., Utz, K. H., Jöhren, P., Wahl, G., & Mericske-Stern, R. (2007). Tactile sensibility of single-tooth implants and natural teeth. Clinical Oral Implants Research, 18, 231–233. https: //doi.org/10.1111/j.1600-0501.2006.01331.x
[12]. Yu, W. T. (2024). Design and application research of a multifunctional flexible tactile perception system (Master’s thesis, Zhejiang University of Science and Technology). Master’s thesis. https: //link.cnki.net/doi/10.27840/d.cnki.gzjkj.2024.000207
[13]. Tang, J. D., Zheng, F. J., Qin, S. D., & Lin, Z. H. (2025). Design of a multifunctional motion protective device for a full-body flexible exoskeleton. Mechanical Engineer, (04), 26-28+32.
[14]. Kan, H. X. (2021). Research and development of a tactile feedback and control system for intelligent prosthetic hands. Master’s thesis, Southeast University.
[15]. Taylor Jr, D. R., & Finley, F. R. (1974). Myoelectric signal processing for control of prosthetic devices. In Proceedings of the 1974 Annual ACM Conference - Volume 2 (pp. 688-695).
[16]. Allard, U. C., Nougarou, F., Fall, C. L., et al. (2016). A convolutional neural network for robotic arm guidance using sEMG-based frequency-features. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 2464-2470). IEEE.
[17]. Han, C. F. (2022). Research on myoelectric control and force tactile perception methods for prosthetic hands (Master’s thesis, Changchun University of Science and Technology). Master’s thesis. https: //link.cnki.net/doi/10.26977/d.cnki.gccgc.2022.000521
[18]. Liu, T. (2024). Research on a bidirectional human-computer interface based on myoelectric recognition and electrical tactile stimulation. Master’s thesis, Shenyang University of Technology.
Cite this article
Ma,Z. (2025). The Application Status and Future Development of Tactile Perception Technology in Prosthetic Design. Theoretical and Natural Science,120,36-42.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of CONF-APMM 2025 Symposium: Controlling Robotic Manipulator Using PWM Signals with Microcontrollers
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. González-Gil, D., Flores-Fraile, J., & López-Marcos, J. (2022). Tactile sensitivity thresholds in implant prosthesis, complete dentures, and natural dentition: A review of their value in literature. Medicina (Kaunas, Lithuania), 58(4), 501.
[2]. Enkling, N., Heussner, S., Nicolay, C., Bayer, S., Mericske-Stern, R., & Utz, K. H. (2012). Tactile sensibility of single-tooth implants and natural teeth under local anesthesia of the natural antagonistic teeth. Clinical Implant Dentistry and Related Research, 14, 273–280. https: //doi.org/10.1111/j.1708-8208.2011.00340.x
[3]. El Sheik, A. M. (2004). Passive tactile sensibility in edentulous subjects treated with dental implants: A pilot study. Journal of Prosthetic Dentistry, 91, 26–32. https: //doi.org/10.1016/j.prosdent.2003.09.014
[4]. Grieznis, L., Apse, P., & Blumfelds, L. (2010). Passive tactile sensibility of teeth and osseointegrated dental implants in the maxilla. Stomatologija, 12, 80–86.
[5]. Negahdari, R., Ghavimi, M., Ghanizadeh, M., & Bohlouli, S. (2019). Active tactile sensibility of three-unit implant-supported fixed partial dentures versus natural dentition. Journal of Clinical and Experimental Dentistry, 11, e636–e641. https: //doi.org/10.4317/jced.56509
[6]. Shala, K. S., Dula, L. J., Pustina-Krasniqi, T., Bicaj, T., Ahmedi, E. F., Lila-Krasniqi, Z., & Tmava-Dragusha, A. (2017). Evaluation of sensibility threshold for interocclusal thickness of patients wearing complete dentures. International Journal of Dentistry, 2017, 1–5. https: //doi.org/10.1155/2017/2356421
[7]. Kazemi, M., Geramipanah, F., Negahdari, R., & Rakhshan, V. (2014). Active tactile sensibility of single-tooth implants versus natural dentition: A split-mouth double-blind randomized clinical trial. Clinical Implant Dentistry and Related Research, 16, 947–955. https: //doi.org/10.1111/cid.12001
[8]. Reveredo, A. M., Shetty, S., Babu, C. S., Kumar, G. S., Priya, K. S., Pandurangappa, R., & Shetty, A. (2013). Evaluation of active tactile perception of single tooth implant prosthesis. International Journal of Oral Implant and Clinical Research, 4, 1–6.
[9]. Enkling, N., Utz, K. H., Bayer, S., & Stern, R. M. (2010). Osseoperception: Active tactile sensibility of osseointegrated dental implants. International Journal of Oral and Maxillofacial Implants, 25, 1159–1167.
[10]. Batista, M., Bonachela, W., & Soares, J. (2008). Progressive recovery of osseoperception as a function of the combination of implant-supported prostheses. Clinical Oral Implants Research, 19, 565–569. https: //doi.org/10.1111/j.1600-0501.2007.01479.x
[11]. Enkling, N., Nicolay, C., Utz, K. H., Jöhren, P., Wahl, G., & Mericske-Stern, R. (2007). Tactile sensibility of single-tooth implants and natural teeth. Clinical Oral Implants Research, 18, 231–233. https: //doi.org/10.1111/j.1600-0501.2006.01331.x
[12]. Yu, W. T. (2024). Design and application research of a multifunctional flexible tactile perception system (Master’s thesis, Zhejiang University of Science and Technology). Master’s thesis. https: //link.cnki.net/doi/10.27840/d.cnki.gzjkj.2024.000207
[13]. Tang, J. D., Zheng, F. J., Qin, S. D., & Lin, Z. H. (2025). Design of a multifunctional motion protective device for a full-body flexible exoskeleton. Mechanical Engineer, (04), 26-28+32.
[14]. Kan, H. X. (2021). Research and development of a tactile feedback and control system for intelligent prosthetic hands. Master’s thesis, Southeast University.
[15]. Taylor Jr, D. R., & Finley, F. R. (1974). Myoelectric signal processing for control of prosthetic devices. In Proceedings of the 1974 Annual ACM Conference - Volume 2 (pp. 688-695).
[16]. Allard, U. C., Nougarou, F., Fall, C. L., et al. (2016). A convolutional neural network for robotic arm guidance using sEMG-based frequency-features. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 2464-2470). IEEE.
[17]. Han, C. F. (2022). Research on myoelectric control and force tactile perception methods for prosthetic hands (Master’s thesis, Changchun University of Science and Technology). Master’s thesis. https: //link.cnki.net/doi/10.26977/d.cnki.gccgc.2022.000521
[18]. Liu, T. (2024). Research on a bidirectional human-computer interface based on myoelectric recognition and electrical tactile stimulation. Master’s thesis, Shenyang University of Technology.