


Volume 111
Published on December 2024Volume title: Proceedings of CONF-MLA 2024 Workshop: Mastering the Art of GANs: Unleashing Creativity with Generative Adversarial Networks
In recent times, generative AI has cropped up with many potential areas where its implementation can promise great efficiency. Above all, there is the Transformer model for which a detailed report is required for elaboration on principles, advantages, and disadvantages. To begin with, in this paper, the basic structure and function of the Transformer model will be examined in depth by discussing the effect of the Transformer model on natural language processing and image generation. Case studies showing practical applications are done by the chapter in content creation, marketing, customer support, virtual assistance, and mental health services by showing how this technology will redefine the fields. The paper finally reviews the literature at the end towards pointing to the future for the formulation of actionable recommendations with the view of enhancing both capabilities and applications related to generative AI technologies. This work underlines the profound impact of Transformer-based generative AI in innovation and efficiency across several dimensions.



With the significant progress of deep learning technology in many fields, the dependence of model training on a large amount of labeled data is increasingly prominent. However, in many practical application scenarios, especially in tasks with high labeling costs, data scarcity often occurs. This realistic challenge has promoted the rise of Few-Shot Learning (FSL) technology, which seeks to achieve effective learning of models with extremely limited samples. This article provides a comprehensive overview of the theoretical background, key technologies of FSL, to explore its potential and effectiveness in solving the problem of small-sample learning. In the method overview section, this article pays special attention to FSL strategies based on data augmentation and transfer learning. By reviewing and analyzing these methods, this article aims to provide some theoretical support and technical references for further exploration in this field and hopes to contribute to solving the problem of data scarcity and promote the sustainable development of this field.
Quadruped robots imitate the gait of animals in nature to achieve flexible and stable movement. Their superior mobility and adaptability have secured an important position in modern robotics. However, quadruped robots still face numerous technical challenges, including complex gait planning. Gait refers to the swinging and supporting movements of the legs and the relative timing of these movements. Different gaits determine various movement forms for quadruped robots, and studying these gaits plays a crucial role in the stable periodic motion of the robot. This paper analyzes three types of gaits—static gait, dynamic gait, and quasi-static gait—based on traditional gait planning methods. Additionally, this paper analyze the movement of the single leg, including the forward and inverse kinematics and the endpoint cycloidal trajectory. Finally, we simulate the stable trot gait in MATLAB, returning the force curve at the foot, joint angles, angular velocity, and angular acceleration curves to complete the verification of the theory.

The advancement of science and technology has resulted in the growing prevalence of facial recognition technology in human-computer interaction, particularly in the domain of emotion recognition, where it shows significant potential. By identifying the user's facial expressions and emotional responses, the system is capable of conducting further analysis and prediction of the user's needs, thereby optimizing the emotion recognition experience of human-computer interaction. This article will elucidate the principles of facial recognition technology, with a particular focus on its practical applications and technical realization in emotion recognition. Furthermore, this article will examine the current limitations of the technology, discuss potential avenues for improvement, and speculate on the future development of facial recognition technology in the field of human-computer interaction. The technology is currently being used in a variety of areas, including smart home technology, medical rehabilitation and public services. The technology has the potential to improve the user experience by increasing the intelligence of devices and providing more personalised services to users through sentiment analysis.

Modular traditional autonomous driving and end-to-end autonomous driving have their own characteristics and play an important role in different scenarios in autonomous driving. The comprehensive performance of these two methods is compared and evaluated systematically in this paper. Modularity Traditional autonomous driving achieves high controllability and interpretability by breaking the system into multiple independent functional modules. However, the efficiency of information transfer between modules is low, and local optimal problems may occur when dealing with complex scenes. The end-to-end autonomous driving system realizes direct mapping from perception to control through deep learning, showing strong global optimization capabilities and the potential to deal with complex scenarios, but also faces black box problems and dependence on a large number of labeled data. This paper discusses the advantages and disadvantages of these two methods in practical applications, and suggests possible future research directions, including the integration of modular and end-to-end methods, improving the interpretability and security of the system, and improving data efficiency and system generalization. Taken together, modular traditional autonomous driving and end-to-end autonomous driving can achieve a safer and more efficient autonomous driving system by combining their respective advantages.
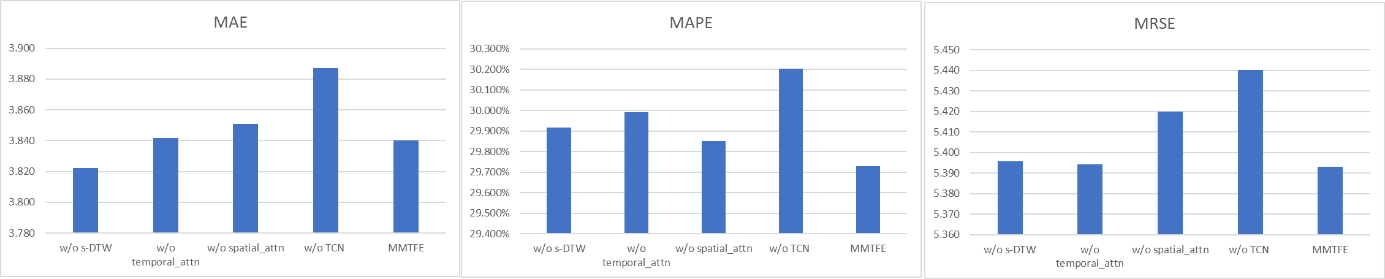
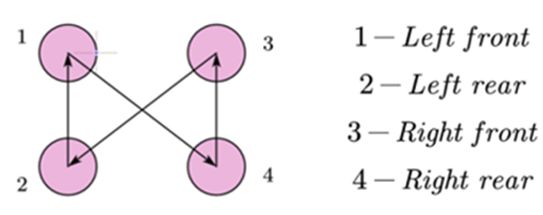
The accurate prediction of traffic flow is a fundamental component of intelligent transportation systems and smart city planning. Conventional methodologies frequently encounter difficulties in capturing the intricate and evolving spatial-temporal interdependencies intrinsic to traffic data. Recent advances have employed Graph Neural Networks (GNNs) and attention mechanisms to address these challenges. However, existing models typically address spatial and temporal dependencies in isolation and may not fully leverage multi-modal interactions within the data. This paper proposes a novel framework, the Multi Modal Traffic Flow Encoder (MMTFE), which integrates temporal attention, spatial attention, and Temporal Convolutional Networks (TCN) for the joint modeling of the complex spatial-temporal patterns observed in traffic flows. By combining these components in a unified architecture, our model effectively captures dynamic dependencies and improves prediction accuracy. The superiority of the proposed approach is substantiated by comprehensive experimental investigations on actual traffic data sets, which reveal that it outperforms existing cutting-edge techniques.
As autonomous driving technology has advanced, it has drawn attention from all around the world. The implementation of autonomous driving technology has the potential to enhance traffic safety, minimize traffic accidents, boost efficiency, facilitate travel, conserve energy, and lower emissions. Autonomous driving technology includes environmental perception, path planning, behavioral decision-making and other technologies. Among them, trajectory planning and control technology is the key technology to realize autonomous driving of automobiles and is the concrete embodiment of automobile intelligence. Graph search algorithms, numerical optimization algorithms, curve fitting algorithms, artificial potential field algorithms, random sampling algorithms, etc. are currently in widespread usage in the field of autonomous driving research. This article will introduce vehicle trajectory planning based on these commonly used algorithms. The necessity of autonomous driving technology research is not only reflected in technological progress, but also covers social security, economic benefits, environmental protection, travel convenience and global competition. By studying autonomous driving technology, humans can better cope with the current challenges of traffic and environment, and at the same time provide strong support for future intelligent transportation and urban planning.
Intelligent transportation systems require traffic flow prediction, and anomaly detection is the key to ensuring accuracy. Using traditional statistical models to handle complex traffic scenarios is becoming increasingly challenging as urbanization accelerates. Consequently, to enhance the precision of forecasting traffic flow and detecting anomalies, various deep learning techniques, and emerging methods have been introduced. The purpose of this paper is to examine how traditional and deep learning methods, as well as emerging technologies, can be used to predict traffic flow and detect anomalies, including techniques such as the autoregressive integrated moving average model (ARIMA), K-nearest neighbor (KNN) algorithm and convolutional neural network (CNN). The result shows that emerging technologies can improve system performance in multiple traffic environments by accurately extracting features from complex data. The research of this paper provides a theoretical basis for the traffic management department and helps to realize a safer and more efficient advanced transportation system.
Brain-computer interface (BCI) technology represents a means of facilitating human-computer interaction. One of the most widely accepted paradigms of brain-computer interface is motor imagery, which enables the recognition of electroencephalogram (EEG) signals generated in a specific brain region by imagining the movement of a limb. Following the acquisition, preprocessing, feature processing, and signal classification of the EEG signals, the complex signals are accurately recognized. Therefore, by creating a control system that translates the recognized EEG signals into movement commands for the robot and transmits them to the robot, it is possible to control the robot's movements by motor imagery. The convolutional neural network is the most popular signal processing algorithm due to its high EEG recognition accuracy, excellent performance in feature extraction, and superior performance in end-to-end learning. The convolutional neural network is an optimal method for signal processing in robot control. This makes CNN an optimal choice for processing EEG signals in robot control, enhancing both the effectiveness and user experience of BCI systems by enabling more intuitive and responsive interactions with robotic devices.
In recent years, traffic flow prediction technology has been transformed from statistics based parametric methods and machine learning driven non-parametric methods to big data driven deep learning methods. This paper summarizes and summarizes the existing methods and improvement measures of long and short term traffic flow prediction based on deep learning. The time range of traffic flow forecast based on the model is divided into long-term and short term. The short-term traffic flow forecasting methods are subdivided into time series model, non-parametric forecasting model and probability forecasting model, and the advantages and disadvantages of each method and the feasibility of the specific methods are summarized. As for the long-term model, it is mainly based on the application of GCN model to other models, and then the specific methods of its hybrid model are outlined, systematically describing the value of deep learning in traffic flow prediction. Finally, the future research direction and development trend in this field are predicted and prospected.