


Volume 10
Published on September 2023Volume title: Proceedings of the 2023 International Conference on Mechatronics and Smart Systems
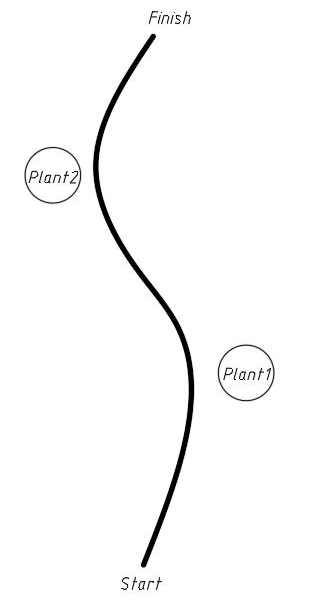
As many potted plants are placed at long distances from each other in public areas, watering them leads to much manpower consumption, while using large-scale irrigation in this situation is unsuitable. Since plants are relatively stationary, it’s appropriate to use robots to water them, instead of human labor. To make watering indoor plants easier, in this article, an Arduino-based wheeled robot for plant-watering in public places is designed. 3D modeling, circuit design, programming and verification experiments have been conducted to complete this design. The achievement includes a 3D model, a control circuit, an executive system and Arduino code. In this research, the cost issue has been taken into consideration. The designed robot is relatively economical, as it only uses some basic inexpensive components. The robot has the capacity to realize route-tracking for navigation, detect the plant right before it and spray water accurately, with various sensors. The existing design can achieve predetermined goals at present, and improvements are going to be undertaken in the future.



Lower extremity rehabilitation-assisted exoskeleton robots bring together multiple disciplines such as biomechanics, control engineering, robotics, and computer science. The main role of lower extremity rehabilitation exoskeleton robots is to help patients and rehabilitators to maintain or restore the mobility of lower extremities, therefore, proper research and discussion of human gait analysis is the basis for establishing and improving such exoskeleton robots. To analyse and evaluate the positive effects of modern technology on stroke patients, the development of human gait capture and simulation technologies will be mainly summarized, the latest human gait capture and simulation technologies will be classified and evaluated. And through a comprehensive review and analysis of research advances in these areas, the usefulness of lower extremity rehabilitation-assisted exoskeleton robots for stroke populations is evaluated. This paper is informative in studying the usefulness of a lower limb exoskeleton robot combined with gait capture and simulation technology for rehabilitation training of stroke patients.

Soft robots have become an emerging field of research with the advancement of science and technology. It has the advantages: flexible, soft and fast. It has good results within narrow space work and has great research potential in disaster relief, exploration and medical treatment. It has a theoretically infinite number of degrees of freedom, but degrees of freedom and actuators do not always correspond in a straightforward one-to-one manner, making it difficult to achieve accurate, control-accurate modelling. It is worth exploring how modelling techniques and sensor control techniques can be optimized to improve control accuracy and achieve human-machine interaction. In addition, most actuators currently use a single drive method, which leads to the limitations of redundant degree of freedom control. Combining multiple drive methods while ensuring drive control accuracy and drive force is also a future research direction. In this paper, the current state of control and drive research in soft robots will be introduced. Then three control modelling methods - modelled, modeless and hybrid control will be discussed in detail. Three common drive methods will be mentioned - fluid drive, SMA drive and EAP drive. A prospect on the control methods and drive mode of soft robots will be given. This paper is useful for robotics research.
Multi-legged robots have become a research hotspot in the field of robotics, and they have a wide range of applications in military, rescue, and detection fields. The current state of research in the field of multi-legged robots is reviewed in this paper, and the types of quadrupedal robots, hexapod robots, and biped robots are introduced in terms of multi-legged robot types. In terms of the technology of multi-legged robots, technology of multi-legged robots and the technical architecture are introduced. Some practical applications in the field of multi-legged robots are also presented. The comprehensive analysis shows that multi-legged robots have strong adaptability and flexibility, but there are still some challenges in control and stability. In the future, a focus will be placed on the enhancement of environment perception and intelligent control of multi-legged robots, which will result in an increase in their reliability and performance when they are applied in practical scenarios.
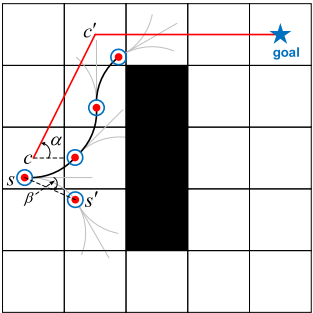
This paper discusses the problem of local path planning for autonomous vehicles. This article introduces pruning strategies and their related map construction and data processing. Next, a forward path planning strategy was introduced, and a universally applicable path selection method was provided. The value of forward prediction strategy for autonomous driving technology was demonstrated by comparing it with ordinary mobile robot path planning algorithms. Then, the optimization of the forward paths through a pruning strategy reduced the time required for updating data by the algorithm introduced in the article. This article refers to the data provided in two literatures, compares and analyzes the advantages and disadvantages of two path planning schemes, and attempts to combine some of their advantages. At the end of this article, the calculation results based on MATLAB mathematical modeling are provided, and the rationality analysis of this path planning strategy is provided as well. Based on these analyses, this article provides suggestions for optimizing path planning algorithms.
The Unmanned Aerial Vehicles (UAVs) have played a much more important role in daily life, ranging from entertainment and military use, in which case UAV swarm is adopted as means to lower the operation cost, as well as to compensate for the insufficient performance of a single drone. However, sharp distinctions between individual drones and UAV swarm exist not only in the field of controlling, but in the area of aerodynamics as well. To conclude, the operator, instead of a team of engineers, needs to perform severe tasks with the help of several drones which act as a swarm rather than interfere with each other. Meanwhile, in order to improve the efficiency of UAV swarm, different formations are looked into from different fields, mainly aerodynamics and control engineering. This review will mainly focus on the aerodynamics performance of formations of swarming UAVs, both in close formation flight and extended formation flight. Comparisons will also be made to show the merits and demerits of these formations, providing convenience for path planning of different tasks.
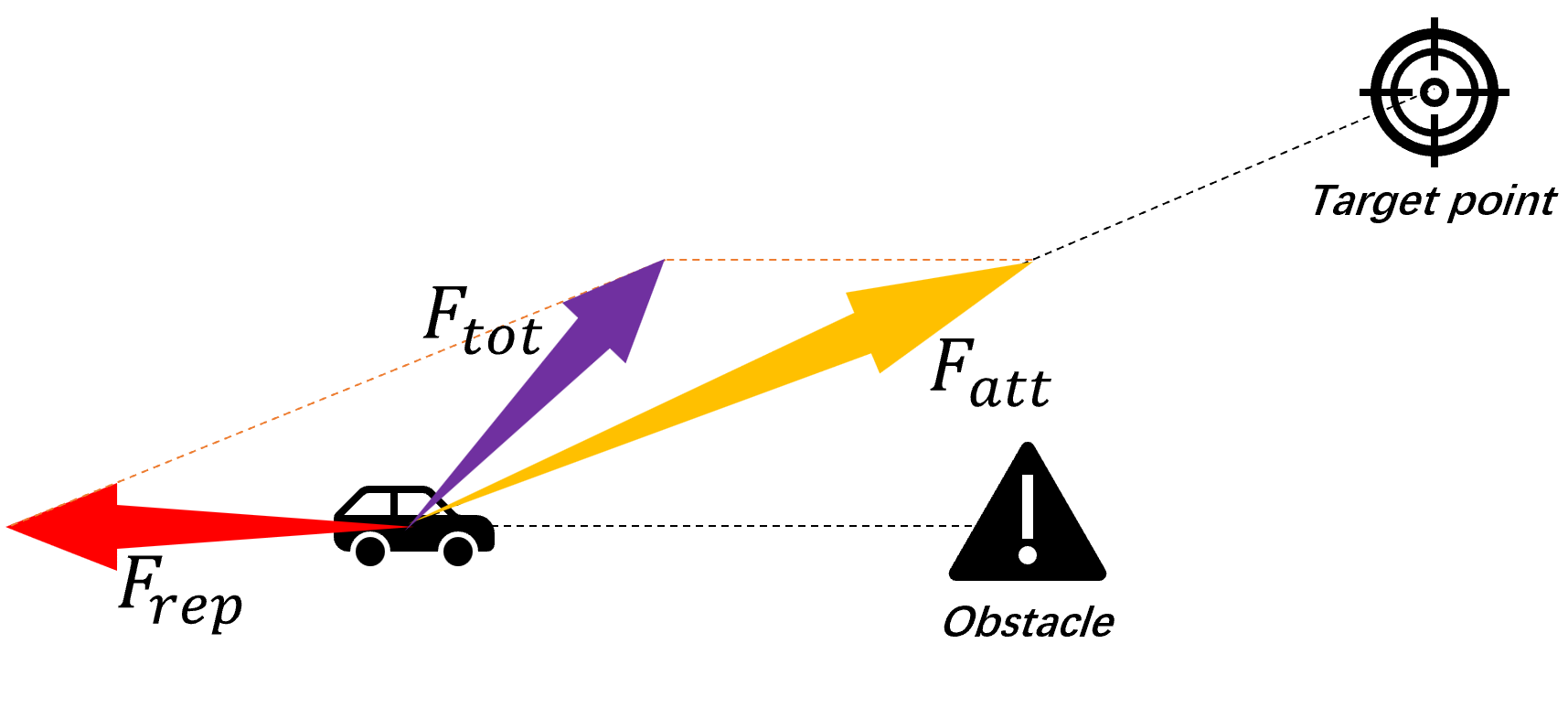
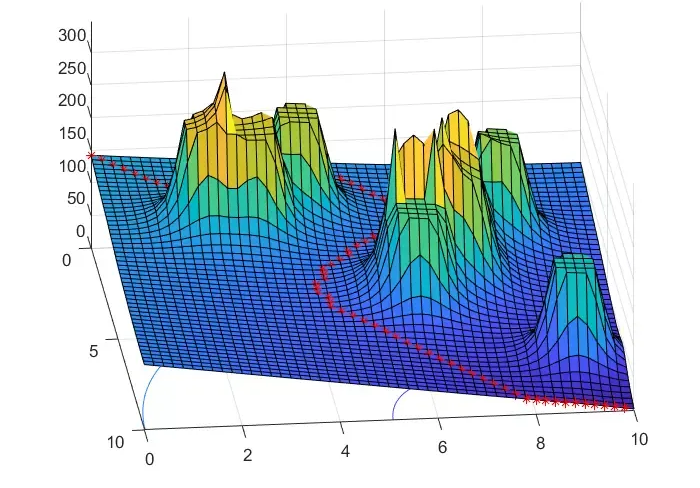
With the development of autonomous driving technology, its applications permeate many aspects of work and life, providing convenience while reducing labor costs. Path planning has always been important for autonomous driving, where APF is widely used thanks to its simplicity of calculation and effectiveness. However, there’re still problems existing such as local minima, influenced by initial positions and parameters, and so on. In this study, a better approach to solving the local minimum issue is suggested. Firstly, the odometry method is used for the determination of falling into local minima by saving and computing the relationships between adjacent steps. Subsequently, a variable step length method is designed for escaping local minimum points and bypassing obstacles in front. The feasibility and robustness of the method were verified by simulations, and this method proved capable of solving the local minima and planning a reasonable trajectory.
With the development and widely use of unmanned aerial vehicles (UAVs) in recent years, the development of efficient path planning methods for automation has become crucial. Obstacle avoidance and path planning are the key components of UAV path planning. This article provides an overview of obstacle avoidance and path planning techniques for UAVs based on the artificial potential field method (APF method). This article begins with the explaining the principles of artificial potential field on this basis discusses its advantages and limitations. The article then summarizes the improvement strategies proposed by previous researchers to address issues like local minimum values and unreachable targets, such as introducing a new repulsive potential energy function, combining APF with other planning methods, and utilizing flow functions. Furthermore, it presents examples of the application and the performance of usage of these techniques in both static and dynamic environments. Based on this, the prospects and developing trend of UAV obstacle avoidance methods based on artificial potential field are foresee, such as combined with DRL and deep learning.
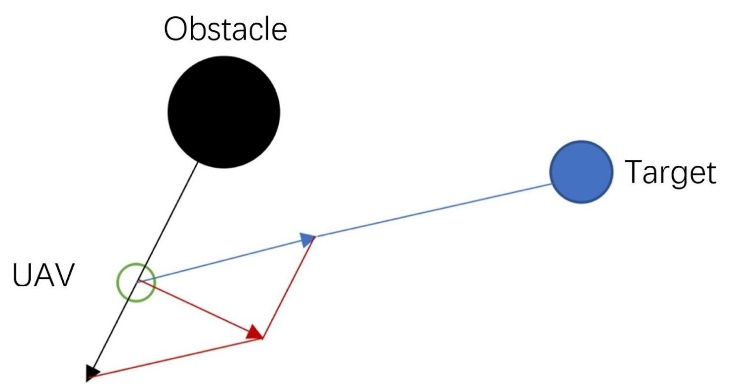
With the advancement of unmanned aerial vehicle (UAV) technology and its widespread use in many facets of manufacturing and daily life, the need for UAV mission automation is becoming more and more practical. In order to improve the automatic obstacle avoidance and path planning performance of UAVs, this essay proposes an optimized route planning algorithm based on the artificial potential field (APF) method, which have solved the typical issue of the APF. This method chooses to conduct a pre planning trajectory of the UAV based on a rapidly expanding random tree (RRT). The pre-planned path will be split into continuous particles, and then generating intermediate waypoints. A nearby waypoint offers a gravitational force to aid the UAV in escaping the local minimum when it enters it. At the same time, taking the distance from the UAV to the obstacle and the radius of influence of the obstacle itself into consideration, dynamically adjust the gravitational and repulsive coefficients, set up a non-gravitational zone around the obstacle, which is beneficial for the UAV to elude the obstacle. And set up a repulsive limited action zone to reduce unnecessary turns in the trajectory to achieve the effect of path optimization. Considering the difficulty of single UAV missions in most cases, this paper discusses cooperative flight path planning for multiple UAVs into consideration.
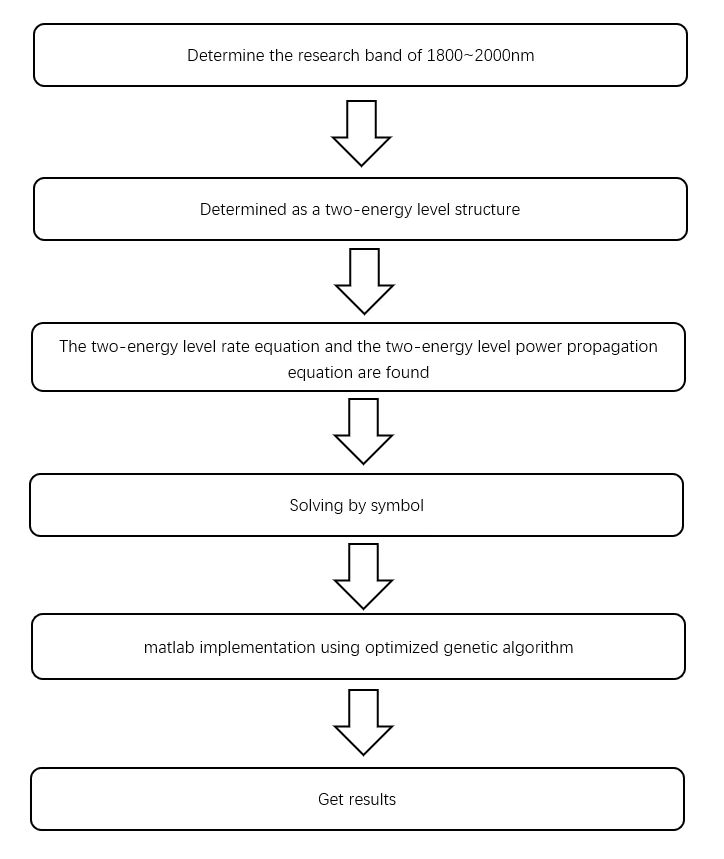
The optical fiber amplifier doped with rare earth elements has the characteristics of high gain, high doping concentration and short length. Compared with other fiber optic systems, the fiber used is shorter, also known as lumped fiber amplifier. At present, Er, Pr, Tm, Nd and Yb doped fiber amplifiers and lasers are mainly studied more. To further extend the transmission distance, improve the transmission quality and increase the transmission capacity, it is very important for the research of fiber amplifier. In this research, using a two-level structure, we investigate the maximum of the peak gain of the gain spectrum of a thulium-doped broadband fiber amplifier in the 1800-2000 nm wavelength range. Signal gain is inversely proportional to fiber length, doping concentration, and pump power in both the absorption spectrum and the emission spectrum, as shown by the relationship diagram of signal gain with these variables. And through the genetic algorithm data optimization, we get that when the fiber length is 2.2 µm, the maximum gain is 42.7 dB.