


Volume 147
Published on April 2025Volume title: Proceedings of the 3rd International Conference on Mechatronics and Smart Systems
Underwater tools often face challenges in grasping objects effectively, as water resistance and buoyancy can undermine their precision and grip strength. In contrast, the American lobster (Homarus americanus) has claws that skillfully manage these obstacles, effortlessly holding onto a wide range of items in marine environments. Drawing on prior research into lobster-inspired designs, this study unveils a new tool that merges rigid and flexible components to boost underwater performance. The flexible part, crafted from silicone such as Dragon Skin 10, mirrors the serrated teeth of the lobster’s claw for reliable gripping, while a gear system with multiple interlocking gears ensures accurate control over force and positioning. Developed in three phases—first copying the claw’s shape, then fine-tuning its size, and finally enhancing its function, the tool excelled in tests using objects from the Evolved Grasping Analysis Dataset (EGAD), surpassing standard designs with higher success rates and less effort. It shows great potential for deep-sea exploration and underwater repairs, though its real-world durability, particularly the gear mechanism, awaits confirmation through ocean trials.



Smart materials are at the cutting edge of modern engineering. Their ability to respond dynamically to changes in the environment enables adaptive and efficient systems. The need in the aerospace industry for lighter, energy-efficient, and highly adaptive materials has driven further development and integration of smart materials into aircraft, spacecraft, and satellite structures. These materials have been applied to the development of morphing wings, vibration control systems, deployable components, and structural health monitoring and have greatly contributed to flight efficiency and reliability. However, they are not widely applied because of limitations, such as temperature sensitivity, fatigue resistance, low actuation force, and scalability issues in large-scale aerospace applications. The solution to these challenges is crucial for ensuring the long-term durability and safety of smart materials under extreme conditions in the aerospace industry. This study focuses on the development, mechanism application, and future development of the following three popular smart materials: Shape Memory Alloys, Piezoelectric Materials, and Electroactive Polymers. The strength of each material will be discussed together with its limitations and how it is being used in the transformation of engineering within the aerospace sector. It highlights how smart materials have increasingly become active players in providing adaptive, sustainable, and high-performance aerospace systems, and critically reviews challenges from smart materials that are faced by real-world aerospace applications, with their potential solution and long-term viability.
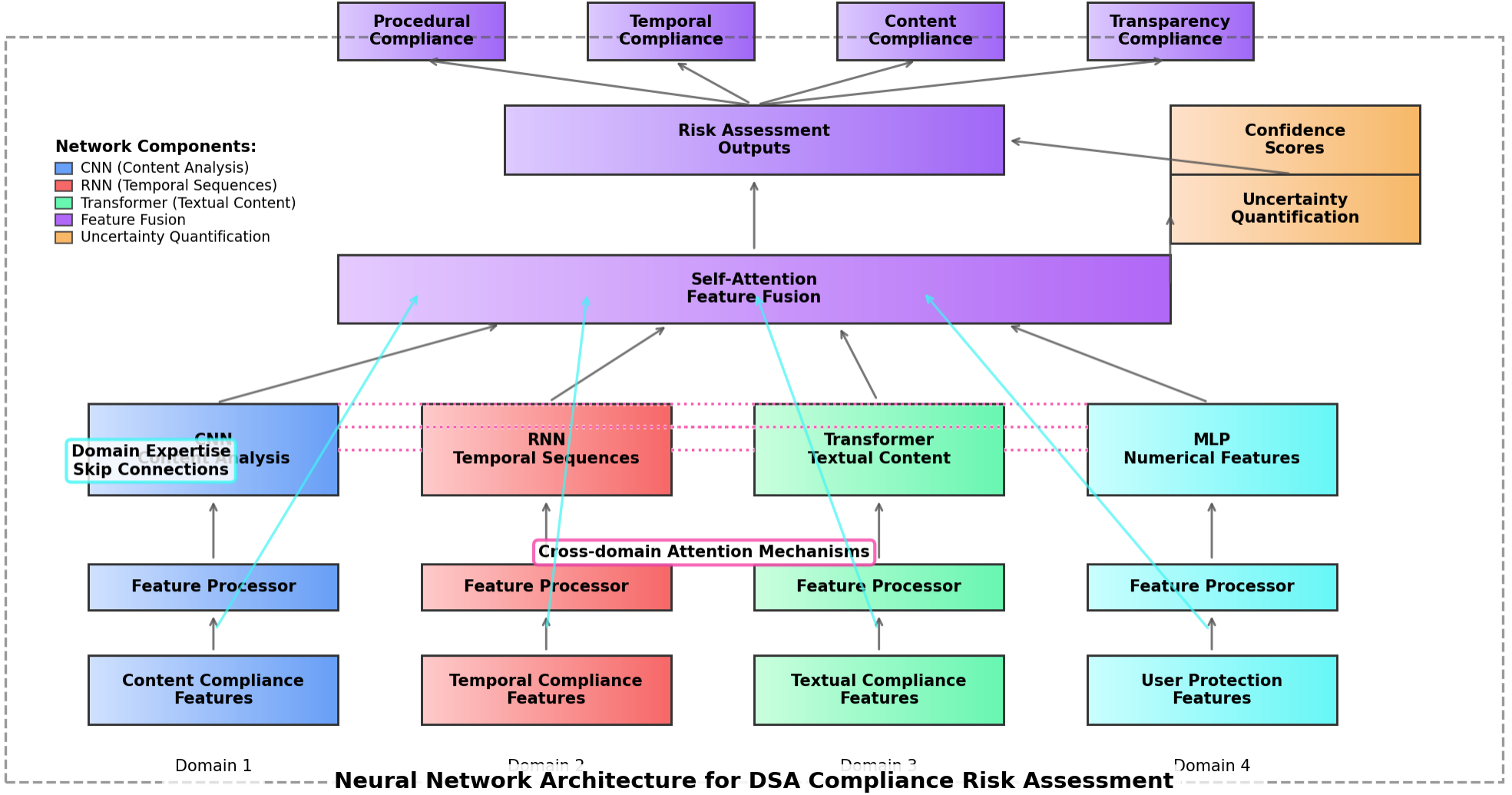
This paper presents an innovative machine learning approach for automated compliance monitoring of Digital Services Act (DSA) requirements across multi-product digital platforms. The proposed framework addresses the significant challenges of monitoring regulatory compliance in complex digital environments where manual verification processes prove insufficient and error-prone. The methodology introduces a formalized representation of DSA requirements through algorithmic processing and transforms these into machine-verifiable specifications using metamorphic testing principles and timed automata models. The core architecture implements a hybrid risk assessment model combining supervised and unsupervised learning techniques to evaluate compliance across heterogeneous platform environments. Comprehensive evaluation across multiple digital service categories demonstrates detection accuracy between 0.86-0.94 (F1-score) with processing efficiency ranging from 78% to 95% depending on platform characteristics. The multi-platform data integration pipeline achieves near real-time monitoring capabilities while respecting data protection constraints. The framework addresses key technical challenges including the complexity of requirement formalization, data access limitations, and adaptation to evolving regulatory interpretations. This research contributes significant advancements toward automated, scalable compliance verification solutions essential for effective implementation of the Digital Services Act across diverse digital service ecosystems.
This study focuses on the synthesis and performance optimization of novel electrode materials for lithium-ion batteries. By analyzing the structural stability, interfacial reactions, and electrochemical properties of both cathode and anode materials, various optimization strategies such as gradient doping, nanocomposite design, and interface engineering were proposed. Multiple electrochemical testing methods, including constant current charge–discharge, cyclic voltammetry, and electrochemical impedance spectroscopy, were employed to comprehensively assess the effects of these strategies on material performance. The results indicate that gradient-doped cathode materials exhibit enhanced thermal stability and reduced capacity decay under high-temperature and high-voltage conditions; the nanocomposite anode design effectively alleviates the volume expansion of silicon-based materials, significantly reducing the expansion rate and improving cycling stability; and interface engineering markedly decreases the charge transfer impedance, thereby boosting battery power output. Full-cell evaluations demonstrate that the novel electrode materials achieve an energy density of 235 Wh·kg⁻¹, while maintaining high cycle life even under extreme temperature conditions. Furthermore, the study systematically analyzes key issues related to industrial-scale production, material compatibility, and sustainable development, discussing the feasibility of process optimization and environmentally friendly technologies for large-scale applications. Overall, this research not only provides theoretical and experimental support for the development of high-performance lithium-ion battery electrodes but also outlines a clear pathway for industrialization and the advancement of a green, low-carbon economy.
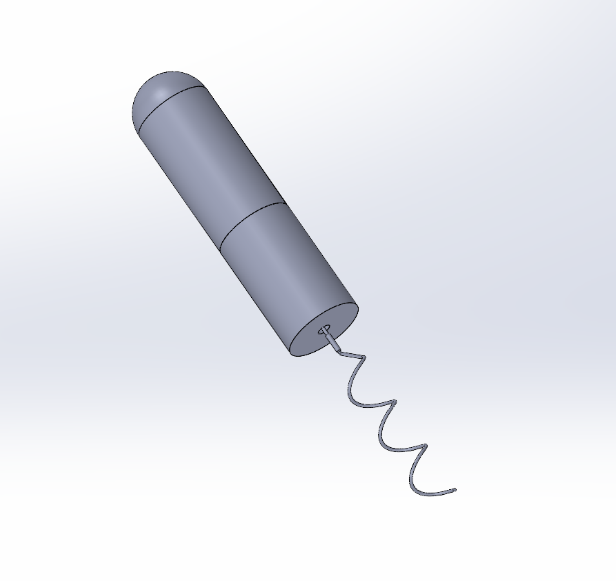
Micro-robots designed for low Reynolds number environments are bound to overcome significant viscous resistance and operate using non-reciprocal motion patterns. So, this article will develop a biomimetic robot inspired by flagellar propulsion like some bacteria or sperm, and an analysis of this robot’s dynamic performances, employing computational modeling and experimental validation. The similar results between the ideal situation simulated in MATLAB and experimental data show that this kind of robot can provide good energy efficiency and optimized motion in viscous fluids for biomedical and microfluidic applications.
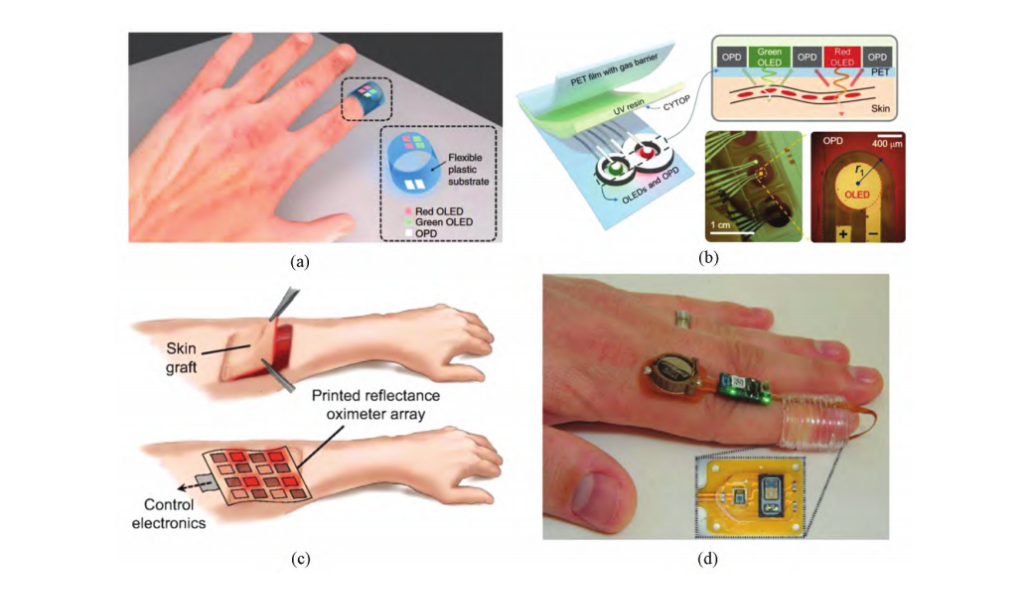
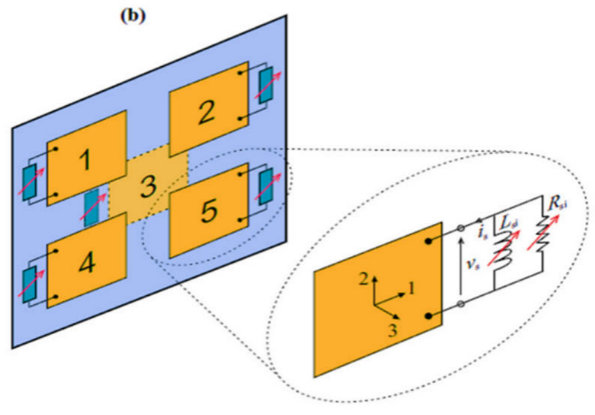
In recent years, with the rapid advancement of technology and increasing attention to health management, wearable medical devices such as smart bracelets and health monitoring watches have gradually become part of daily life. Among these devices, blood oxygen monitoring equipment has garnered significant attention due to its ability to reflect the saturation level of oxygen in human blood in real time, which is crucial for early detection of respiratory diseases and assessment of overall health. This paper focuses on the promising organic semiconductor material PEDOT, using qualitative methods to delve into its optoelectronic properties and current application status. The study found that PEDOT exhibits excellent optoelectronic characteristics. Based on the PPG principle, it should be effectively applicable to blood oxygen sensor modules, enhancing the accuracy and flexibility of blood oxygen detection. Furthermore, PEDOT has found extensive application in diverse domains, such as medical health devices, including blood oxygen meters, and various flexible electronic devices. It is anticipated to remain a pivotal material in the ongoing development of blood oxygen meters and associated flexible electronic devices.
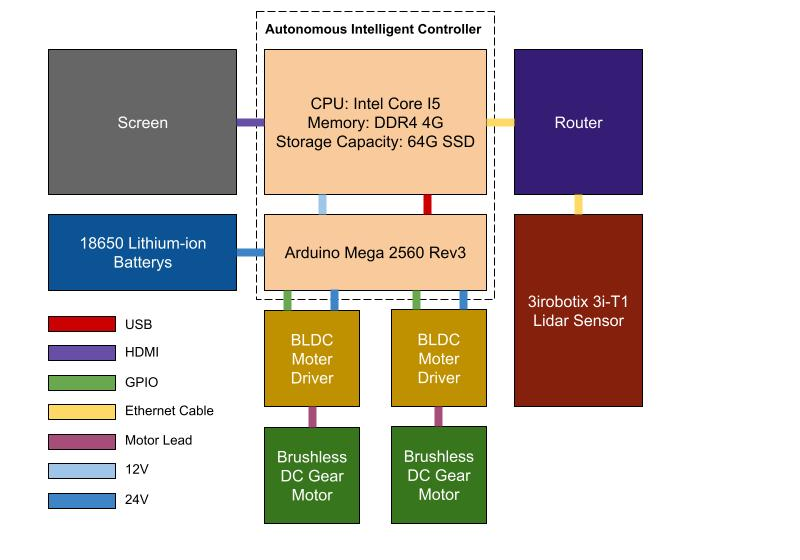
Nowadays more and more natural disasters and accidents happen around us, resulting in situations where people are trapped in danger. These areas often have complex terrains or high-risk environments. Rescue robots are becoming increasingly important in disaster relief and complex environment exploration. The use of rescue robots significantly improves search and rescue efficiency and reduces risk of casualties during rescue operations in hard-to-access or dangerous areas like earthquake ruins or fire scenes. This research develops an efficient rescue robot system that integrates advanced path planning and rapid map-building technologies for multi-target rescue tasks in complex environments. The system's core consists of two main modules: one is a multi-target path planning and obstacle avoidance module that combines A* and TSP algorithms, aimed at generating the shortest path covering all rescue points; the other is a map building module based on SLAM technology, for quickly and accurately drawing environmental maps. Comprehensive validation in computer simulation environments and real miniature car testing environments has shown that the path planning module combining A* and TSP algorithms can successfully plan the shortest rescue routes. Meanwhile, SLAM technology demonstrates its high accuracy and real-time performance in map building. The real miniature car's test results further confirm the system's feasibility and stability. This project offers a method to optimize the path planning of traditional rescue robots, potentially improving the efficiency of multi-target rescue missions. Additionally, the experimental results provide guidance and suggestions for the design, development, and deployment of actual rescue robots in the future.